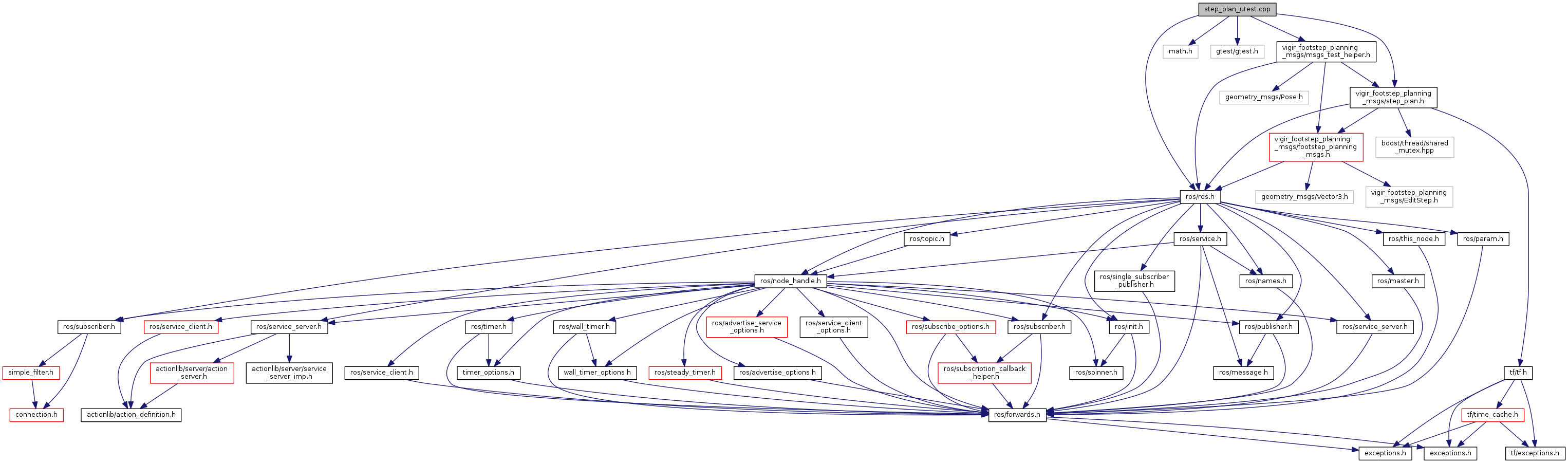
#include <ros/ros.h>#include <math.h>#include <gtest/gtest.h>#include <vigir_footstep_planning_msgs/step_plan.h>#include <vigir_footstep_planning_msgs/msgs_test_helper.h>
Include dependency graph for step_plan_utest.cpp:
Go to the source code of this file.
Functions | |
| msgs::StepPlan | genStepPlan (geometry_msgs::Pose start, unsigned int steps, unsigned int foot_index=msgs::Foot::LEFT, unsigned int start_step_index=0, bool closing_step=true) |
| TEST (StepPlan, appendStepPlan) | |
| TEST (StepPlan, updateStepPlan) | |
| TEST (StepPlan, stitchStepPlan) | |
Function Documentation
| msgs::StepPlan genStepPlan | ( | geometry_msgs::Pose | start, |
| unsigned int | steps, | ||
| unsigned int | foot_index = msgs::Foot::LEFT, |
||
| unsigned int | start_step_index = 0, |
||
| bool | closing_step = true |
||
| ) |
Definition at line 14 of file step_plan_utest.cpp.
| TEST | ( | StepPlan | , |
| appendStepPlan | |||
| ) |
Definition at line 65 of file step_plan_utest.cpp.
| TEST | ( | StepPlan | , |
| updateStepPlan | |||
| ) |
Definition at line 93 of file step_plan_utest.cpp.
| TEST | ( | StepPlan | , |
| stitchStepPlan | |||
| ) |
Definition at line 127 of file step_plan_utest.cpp.