Constraints evaluated at discretized times along a trajectory. More...
#include <time_discretization_constraint.h>
Public Types | |
| using | Bounds = ifopt::Bounds |
| using | VecTimes = std::vector< double > |
Public Member Functions | |
| void | FillJacobianBlock (std::string var_set, Jacobian &) const override |
| VecBound | GetBounds () const override |
| Eigen::VectorXd | GetValues () const override |
| TimeDiscretizationConstraint (double T, double dt, std::string constraint_name) | |
| Constructs a constraint for ifopt. More... | |
| TimeDiscretizationConstraint (const VecTimes &dts, std::string name) | |
| construct a constraint for ifopt. More... | |
| virtual | ~TimeDiscretizationConstraint ()=default |
Protected Member Functions | |
| int | GetNumberOfNodes () const |
Protected Attributes | |
| VecTimes | dts_ |
| times at which the constraint is evaluated. More... | |
Private Member Functions | |
| virtual void | UpdateBoundsAtInstance (double t, int k, VecBound &b) const =0 |
| Sets upper/lower bound a specific time t, corresponding to node k. More... | |
| virtual void | UpdateConstraintAtInstance (double t, int k, VectorXd &g) const =0 |
| Sets the constraint value a specific time t, corresponding to node k. More... | |
| virtual void | UpdateJacobianAtInstance (double t, int k, std::string var_set, Jacobian &jac) const =0 |
| Sets Jacobian rows at a specific time t, corresponding to node k. More... | |
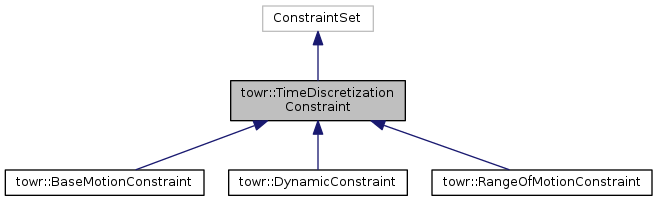
Detailed Description
Constraints evaluated at discretized times along a trajectory.
Often one want to check the values of a specific constraint, e.g. RangeOfMotion, or DynamicConstraint at specific times t along the trajectory. This class is responsible for building the overall Jacobian from the individual Jacobians at each time instance.
Definition at line 48 of file time_discretization_constraint.h.
Member Typedef Documentation
| using towr::TimeDiscretizationConstraint::Bounds = ifopt::Bounds |
Definition at line 51 of file time_discretization_constraint.h.
| using towr::TimeDiscretizationConstraint::VecTimes = std::vector<double> |
Definition at line 50 of file time_discretization_constraint.h.
Constructor & Destructor Documentation
| towr::TimeDiscretizationConstraint::TimeDiscretizationConstraint | ( | double | T, |
| double | dt, | ||
| std::string | constraint_name | ||
| ) |
Constructs a constraint for ifopt.
- Parameters
-
T The total duration of the trajectory. dt The discretization interval at which each constraint is evaluated. constraint_name The name of the constraint.
Definition at line 37 of file time_discretization_constraint.cc.
| towr::TimeDiscretizationConstraint::TimeDiscretizationConstraint | ( | const VecTimes & | dts, |
| std::string | name | ||
| ) |
construct a constraint for ifopt.
- Parameters
-
dts Time instances at which to evaluate the constraints. name The name of the constraint.
Definition at line 52 of file time_discretization_constraint.cc.
|
virtualdefault |
Member Function Documentation
|
override |
Definition at line 90 of file time_discretization_constraint.cc.
|
override |
Definition at line 78 of file time_discretization_constraint.cc.
|
protected |
Definition at line 60 of file time_discretization_constraint.cc.
|
override |
Definition at line 66 of file time_discretization_constraint.cc.
|
privatepure virtual |
Sets upper/lower bound a specific time t, corresponding to node k.
- Parameters
-
t The time along the trajectory to set the bounds. k The index of the time t, so t=k*dt
Implemented in towr::DynamicConstraint, towr::RangeOfMotionConstraint, and towr::BaseMotionConstraint.
|
privatepure virtual |
Sets the constraint value a specific time t, corresponding to node k.
- Parameters
-
t The time along the trajectory to set the constraint. k The index of the time t, so t=k*dt
Implemented in towr::DynamicConstraint, towr::RangeOfMotionConstraint, and towr::BaseMotionConstraint.
|
privatepure virtual |
Sets Jacobian rows at a specific time t, corresponding to node k.
- Parameters
-
t The time along the trajcetory to set the bounds. k The index of the time t, so t=k*dt var_set The name of the ifopt variables currently being queried for.
Implemented in towr::DynamicConstraint, towr::RangeOfMotionConstraint, and towr::BaseMotionConstraint.
Member Data Documentation
|
protected |
times at which the constraint is evaluated.
Definition at line 75 of file time_discretization_constraint.h.
The documentation for this class was generated from the following files: