#include <ros/ros.h>#include <ros/package.h>#include <std_msgs/Int32.h>#include <std_msgs/String.h>#include <boost/thread.hpp>#include <yaml-cpp/yaml.h>#include "robotis_controller_msgs/StatusMsg.h"#include "thormang3_action_module_msgs/IsRunning.h"#include "thormang3_action_module_msgs/StartAction.h"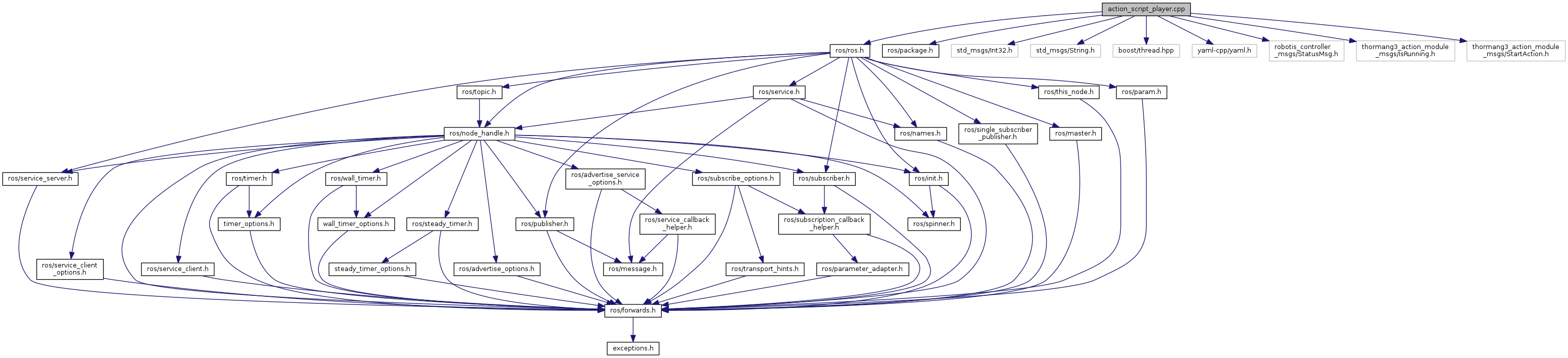
Go to the source code of this file.
Classes | |
| struct | action_script_cmd |
Macros | |
| #define | ACTION_PLAY_CMD_NAME "play" |
| #define | JOINT_NAME_KEY "joint_name" |
| #define | MP3_PLAY_CMD_NAME "mp3" |
| #define | SLEEP_CMD_NAME "sleep" |
| #define | WAIT_ACTION_PLAY_FINISH_CMD_NAME "wait" |
Functions | |
| void | actionScriptNumberCallback (const std_msgs::Int32::ConstPtr &msg) |
| void | actionScriptPlayThreadFunc (int action_script_index) |
| std::string | convertIntToString (int n) |
| int | convertStringToInt (std::string str) |
| bool | isActionRunning (void) |
| int | main (int argc, char **argv) |
| bool | parseActionScript (int action_script_index) |
Variables | |
| ros::Publisher | g_action_page_num_pub |
| std::vector< action_script_cmd > | g_action_script_data |
| std::string | g_action_script_file_path |
| ros::Subscriber | g_action_script_num_sub |
| boost::thread * | g_action_script_play_thread |
| ros::ServiceClient | g_is_running_client |
| thormang3_action_module_msgs::IsRunning | g_is_running_srv |
| std::vector< std::string > | g_joint_name_list |
| ros::Publisher | g_sound_file_name_pub |
| ros::Publisher | g_start_action_pub |
Macro Definition Documentation
| #define ACTION_PLAY_CMD_NAME "play" |
Definition at line 35 of file action_script_player.cpp.
| #define JOINT_NAME_KEY "joint_name" |
Definition at line 34 of file action_script_player.cpp.
| #define MP3_PLAY_CMD_NAME "mp3" |
Definition at line 36 of file action_script_player.cpp.
| #define SLEEP_CMD_NAME "sleep" |
Definition at line 38 of file action_script_player.cpp.
| #define WAIT_ACTION_PLAY_FINISH_CMD_NAME "wait" |
Definition at line 37 of file action_script_player.cpp.
Function Documentation
| void actionScriptNumberCallback | ( | const std_msgs::Int32::ConstPtr & | msg | ) |
Definition at line 282 of file action_script_player.cpp.
| void actionScriptPlayThreadFunc | ( | int | action_script_index | ) |
Definition at line 201 of file action_script_player.cpp.
| std::string convertIntToString | ( | int | n | ) |
Definition at line 62 of file action_script_player.cpp.
| int convertStringToInt | ( | std::string | str | ) |
Definition at line 69 of file action_script_player.cpp.
| bool isActionRunning | ( | void | ) |
Definition at line 74 of file action_script_player.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 331 of file action_script_player.cpp.
| bool parseActionScript | ( | int | action_script_index | ) |
Definition at line 92 of file action_script_player.cpp.
Variable Documentation
| ros::Publisher g_action_page_num_pub |
Definition at line 41 of file action_script_player.cpp.
| std::vector<action_script_cmd> g_action_script_data |
Definition at line 60 of file action_script_player.cpp.
| std::string g_action_script_file_path |
Definition at line 50 of file action_script_player.cpp.
| ros::Subscriber g_action_script_num_sub |
Definition at line 40 of file action_script_player.cpp.
| boost::thread* g_action_script_play_thread |
Definition at line 48 of file action_script_player.cpp.
| ros::ServiceClient g_is_running_client |
Definition at line 44 of file action_script_player.cpp.
| thormang3_action_module_msgs::IsRunning g_is_running_srv |
Definition at line 46 of file action_script_player.cpp.
| std::vector<std::string> g_joint_name_list |
Definition at line 59 of file action_script_player.cpp.
| ros::Publisher g_sound_file_name_pub |
Definition at line 43 of file action_script_player.cpp.
| ros::Publisher g_start_action_pub |
Definition at line 42 of file action_script_player.cpp.