#include <dynamixel_hardware_interface.hpp>
Public Member Functions | |
| DynamixelHardwareInterface () | |
| void | init (ros::NodeHandle nh) |
| void | read_joints (sensor_msgs::JointState js) |
| std::vector< double > | write_joints () |
| ~DynamixelHardwareInterface () | |
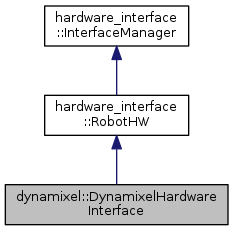
 Public Member Functions inherited from hardware_interface::RobotHW Public Member Functions inherited from hardware_interface::RobotHW | |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual bool | checkForConflict (const std::list< ControllerInfo > &info) const |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual void | doSwitch (const std::list< ControllerInfo > &, const std::list< ControllerInfo > &) |
| virtual bool | init (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| virtual bool | prepareSwitch (const std::list< ControllerInfo > &start_list, const std::list< ControllerInfo > &stop_list) |
| virtual void | read (const ros::Time &time, const ros::Duration &period) |
| virtual void | read (const ros::Time &time, const ros::Duration &period) |
| RobotHW () | |
| virtual void | write (const ros::Time &time, const ros::Duration &period) |
| virtual void | write (const ros::Time &time, const ros::Duration &period) |
| virtual | ~RobotHW () |
| Public Member Functions inherited from hardware_interface::InterfaceManager | |
| T * | get () |
| std::vector< std::string > | getInterfaceResources (std::string iface_type) const |
| std::vector< std::string > | getNames () const |
| void | registerInterface (T *iface) |
| void | registerInterfaceManager (InterfaceManager *iface_man) |
Private Member Functions | |
| DynamixelHardwareInterface (DynamixelHardwareInterface const &) | |
| DynamixelHardwareInterface & | operator= (DynamixelHardwareInterface const &) |
Private Attributes | |
| hardware_interface::EffortJointInterface | _jnt_effort_interface |
| hardware_interface::JointStateInterface | _jnt_state_interface |
| std::vector< double > | _joint_angles |
| std::vector< double > | _joint_commands |
| std::vector< double > | _joint_efforts |
| std::vector< std::string > | _joint_names |
| std::vector< double > | _joint_velocities |
| std::vector< double > | _prev_commands |
| ros::Publisher | torque_pub |
Additional Inherited Members | |
| Protected Types inherited from hardware_interface::InterfaceManager | |
| typedef std::vector< InterfaceManager * > | InterfaceManagerVector |
| typedef std::map< std::string, void * > | InterfaceMap |
| typedef std::map< std::string, std::vector< std::string > > | ResourceMap |
| typedef std::map< std::string, size_t > | SizeMap |
| Protected Attributes inherited from hardware_interface::InterfaceManager | |
| boost::ptr_vector< ResourceManagerBase > | interface_destruction_list_ |
| InterfaceManagerVector | interface_managers_ |
| InterfaceMap | interfaces_ |
| InterfaceMap | interfaces_combo_ |
| SizeMap | num_ifaces_registered_ |
| ResourceMap | resources_ |
Detailed Description
Definition at line 16 of file dynamixel_hardware_interface.hpp.
Constructor & Destructor Documentation
| dynamixel::DynamixelHardwareInterface::DynamixelHardwareInterface | ( | ) |
Definition at line 12 of file dynamixel_hardware_interface.cpp.
| dynamixel::DynamixelHardwareInterface::~DynamixelHardwareInterface | ( | ) |
Definition at line 15 of file dynamixel_hardware_interface.cpp.
|
private |
Member Function Documentation
| void dynamixel::DynamixelHardwareInterface::init | ( | ros::NodeHandle | nh | ) |
Definition at line 19 of file dynamixel_hardware_interface.cpp.
|
private |
| void dynamixel::DynamixelHardwareInterface::read_joints | ( | sensor_msgs::JointState | js | ) |
Copy joint's information to memory
firstly queries the information from the dynamixels, then put it in private attributes, for use by a controller.
Warning: do not get any information on torque
Definition at line 73 of file dynamixel_hardware_interface.cpp.
| std::vector< double > dynamixel::DynamixelHardwareInterface::write_joints | ( | ) |
Send new joint's target position to dynamixels
takes the target position from memory (given by a controller) and sends them to the dynamixels.
Definition at line 88 of file dynamixel_hardware_interface.cpp.
Member Data Documentation
|
private |
Definition at line 35 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 34 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 42 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 41 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 44 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 39 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 43 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 40 of file dynamixel_hardware_interface.hpp.
|
private |
Definition at line 45 of file dynamixel_hardware_interface.hpp.
The documentation for this class was generated from the following files: