This file contains definition of #SDH::cDSA, a class to communicate with the tactile sensors of the SDH. More...
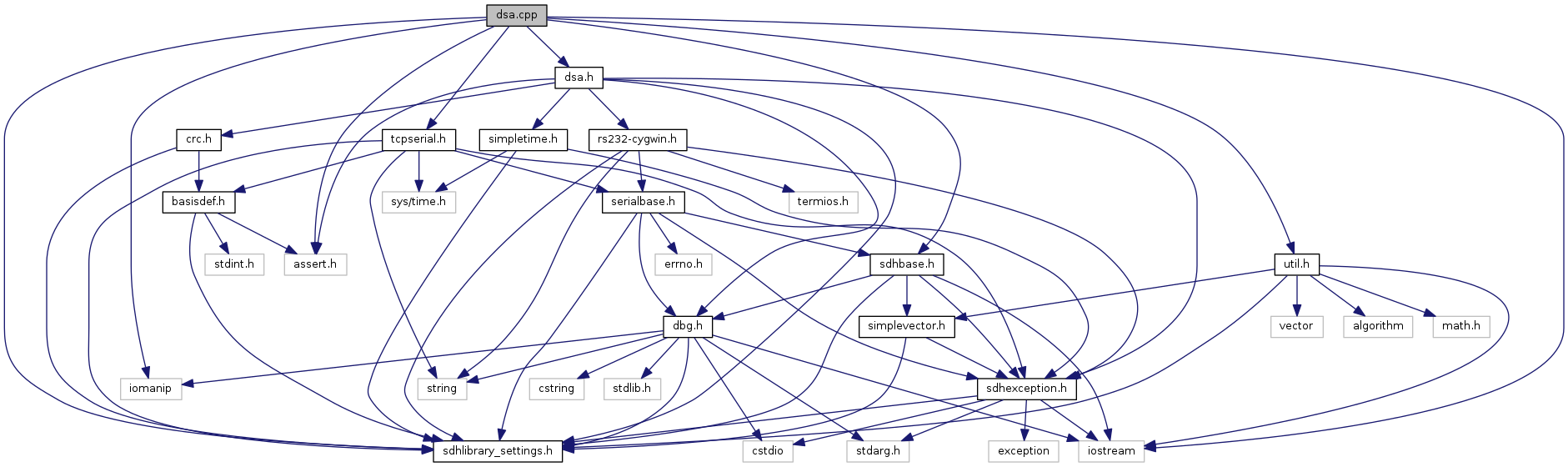
#include "sdhlibrary_settings.h"#include <assert.h>#include <iostream>#include <iomanip>#include "dsa.h"#include "sdhbase.h"#include "util.h"#include "tcpserial.h"
Include dependency graph for dsa.cpp:
Go to the source code of this file.
Macros | |
| #define | PRINT_MEMBER(_s, _var, _member) (_s) << " " << #_member << "=" << _var._member << "\n" |
| #define | PRINT_MEMBER_HEX(_s, _var, _member) (_s) << " " << #_member << "=0x" << std::hex << int(_var._member) << std::dec << "\n" |
Enumerations | |
| enum | eDSAPacketID { eDSA_FULL_FRAME = 0x00, eDSA_QUERY_CONTROLLER_CONFIGURATION = 0x01, eDSA_QUERY_SENSOR_CONFIGURATION = 0x02, eDSA_QUERY_MATRIX_CONFIGURATION = 0x0B, eDSA_CONFIGURE_DATA_ACQUISITION = 0x03, eDSA_QUERY_CONTROLLER_FEATURES = 0x10, eDSA_READ_MATRIX_MASK = 0x04, eDSA_SET_DYNAMIC_MASK = 0xAB, eDSA_READ_DESCRIPTOR_STRING = 0x05, eDSA_LOOP = 0x06, eDSA_QUERY_CONTROLLER_STATE = 0x0a, eDSA_SET_PROPERTIES_SAMPLE_RATE = 0x0c, eDSA_SET_PROPERTIES_CONTROL_VECTOR_FOR_MATRIX = 0x0d, eDSA_GET_PROPERTIES_CONTROL_VECTOR_OF_MATRIX = 0x0e, eDSA_ADJUST_MATRIX_SENSITIVITY = 0x0f, eDSA_GET_SENSITIVITY_ADJUSTMENT_INFO = 0x12, eDSA_SET_MATRIX_THRESHOLD = 0x13, eDSA_GET_MATRIX_THRESHOLD = 0x14 } |
| Command ID for the DSACON32m tactile sensor controller according to DSACON32_Command_Set_Reference_Manual.pdf. More... | |
Functions | |
| std::ostream &NS_SDH | operator<< (std::ostream &stream, cDSA::sControllerInfo const &controller_info) |
| std::ostream &NS_SDH | operator<< (std::ostream &stream, cDSA::sSensorInfo const &sensor_info) |
| std::ostream &NS_SDH | operator<< (std::ostream &stream, cDSA::sMatrixInfo const &matrix_info) |
| NAMESPACE_SDH_START std::ostream & | operator<< (std::ostream &stream, cDSA::sResponse const &response) |
| NAMESPACE_SDH_END std::ostream &NS_SDH | operator<< (std::ostream &stream, cDSA const &dsa) |
Detailed Description
This file contains definition of #SDH::cDSA, a class to communicate with the tactile sensors of the SDH.
General file information
- Date
- 2008-06-09
Copyright
Copyright (c) 2008 SCHUNK GmbH & Co. KG
Definition in file dsa.cpp.
Macro Definition Documentation
| #define PRINT_MEMBER | ( | _s, | |
| _var, | |||
| _member | |||
| ) | (_s) << " " << #_member << "=" << _var._member << "\n" |
| #define PRINT_MEMBER_HEX | ( | _s, | |
| _var, | |||
| _member | |||
| ) | (_s) << " " << #_member << "=0x" << std::hex << int(_var._member) << std::dec << "\n" |
Enumeration Type Documentation
| enum eDSAPacketID |
Command ID for the DSACON32m tactile sensor controller according to DSACON32_Command_Set_Reference_Manual.pdf.
Function Documentation
| std::ostream& NS_SDH operator<< | ( | std::ostream & | stream, |
| cDSA::sControllerInfo const & | controller_info | ||
| ) |
| std::ostream& NS_SDH operator<< | ( | std::ostream & | stream, |
| cDSA::sSensorInfo const & | sensor_info | ||
| ) |
| std::ostream& NS_SDH operator<< | ( | std::ostream & | stream, |
| cDSA::sMatrixInfo const & | matrix_info | ||
| ) |
| NAMESPACE_SDH_START std::ostream& operator<< | ( | std::ostream & | stream, |
| cDSA::sResponse const & | response | ||
| ) |
| NAMESPACE_SDH_END std::ostream& NS_SDH operator<< | ( | std::ostream & | stream, |
| cDSA const & | dsa | ||
| ) |