Very simple C++ programm to make an attached SDH move. With non-sequential call of move and Stop. See __help__ and online help ("-h" or "--help") for available options. More...
#include <iostream>#include <vector>#include "sdh/sdh.h"#include "sdh/util.h"#include "sdh/sdhlibrary_settings.h"#include "sdh/basisdef.h"#include "sdhoptions.h"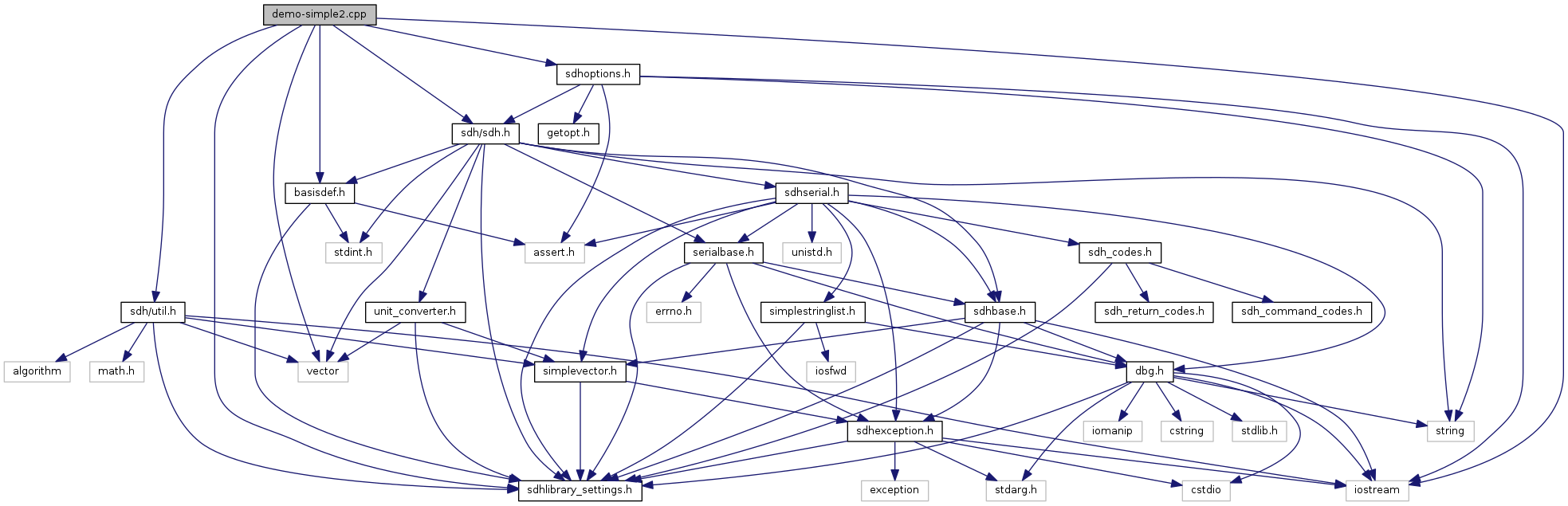
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Variables | |
Some informative variables | |
| char const * | __help__ |
| char const * | __author__ = "Dirk Osswald: dirk.osswald@de.schunk.com" |
| char const * | __url__ = "http://www.schunk.com" |
| char const * | __version__ = "$Id: demo-simple2.cpp 10351 2013-06-18 16:28:14Z Osswald2 $" |
| char const * | __copyright__ = "Copyright (c) 2007 SCHUNK GmbH & Co. KG" |
Detailed Description
Very simple C++ programm to make an attached SDH move. With non-sequential call of move and Stop. See __help__ and online help ("-h" or "--help") for available options.
General file information
- Date
- 2007-01-18
This code contains only the very basicst use of the features provided by the SDHLibrary-CPP. For more sophisticated applications see the other demo-*.cpp programms, or of course the html/pdf documentation.
Copyright
Copyright (c) 2007 SCHUNK GmbH & Co. KG
Definition in file demo-simple2.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 99 of file demo-simple2.cpp.
Variable Documentation
| char const* __author__ = "Dirk Osswald: dirk.osswald@de.schunk.com" |
Definition at line 89 of file demo-simple2.cpp.
| char const* __copyright__ = "Copyright (c) 2007 SCHUNK GmbH & Co. KG" |
Definition at line 92 of file demo-simple2.cpp.
| char const* __help__ |
Definition at line 64 of file demo-simple2.cpp.
| char const* __url__ = "http://www.schunk.com" |
Definition at line 90 of file demo-simple2.cpp.
| char const* __version__ = "$Id: demo-simple2.cpp 10351 2013-06-18 16:28:14Z Osswald2 $" |
Definition at line 91 of file demo-simple2.cpp.