Simple script to do grasping using tactile sensor info feedback. See __help__ and online help ("-h" or "--help") for available options. More...
#include <iostream>#include <vector>#include "sdh/sdh.h"#include "sdh/util.h"#include "sdh/sdhlibrary_settings.h"#include "sdh/basisdef.h"#include "sdh/dsa.h"#include "sdhoptions.h"#include "dsaboost.h"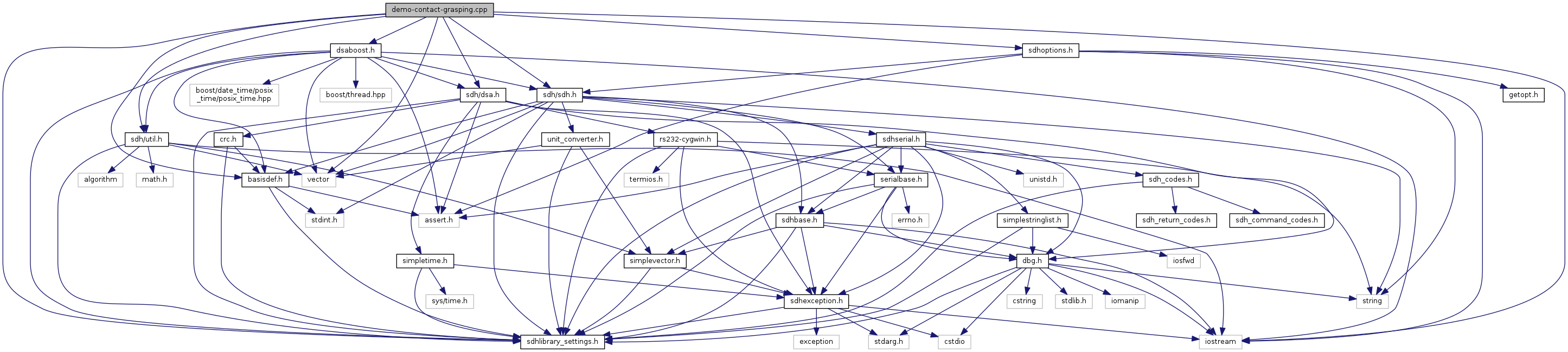
Go to the source code of this file.
Functions | |
| void | AxisAnglesToFingerAngles (std::vector< double > aa, std::vector< double > &fa0, std::vector< double > &fa1, std::vector< double > &fa2) |
| void | GotoStartPose (cSDH &hand, char const *msg) |
| int | main (int argc, char **argv) |
Variables | |
| cDBG | cdbg (false,"red") |
| char const * | usage |
Some informative variables | |
| char const * | __help__ |
| char const * | __author__ = "Dirk Osswald: dirk.osswald@de.schunk.com" |
| char const * | __url__ = "http://www.schunk.com" |
| char const * | __version__ = "$Id: demo-contact-grasping.cpp 10894 2013-11-11 13:58:38Z Osswald2 $" |
| char const * | __copyright__ = "Copyright (c) 2007 SCHUNK GmbH & Co. KG" |
Detailed Description
Simple script to do grasping using tactile sensor info feedback. See __help__ and online help ("-h" or "--help") for available options.
General file information
- Date
- 2009-08-02
Copyright
Copyright (c) 2007 SCHUNK GmbH & Co. KG
Definition in file demo-contact-grasping.cpp.
Function Documentation
| void AxisAnglesToFingerAngles | ( | std::vector< double > | aa, |
| std::vector< double > & | fa0, | ||
| std::vector< double > & | fa1, | ||
| std::vector< double > & | fa2 | ||
| ) |
Definition at line 138 of file demo-contact-grasping.cpp.
| void GotoStartPose | ( | cSDH & | hand, |
| char const * | msg | ||
| ) |
Definition at line 117 of file demo-contact-grasping.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
finished:
Definition at line 155 of file demo-contact-grasping.cpp.
Variable Documentation
| char const* __author__ = "Dirk Osswald: dirk.osswald@de.schunk.com" |
Definition at line 101 of file demo-contact-grasping.cpp.
| char const* __copyright__ = "Copyright (c) 2007 SCHUNK GmbH & Co. KG" |
Definition at line 104 of file demo-contact-grasping.cpp.
| char const* __help__ |
Definition at line 64 of file demo-contact-grasping.cpp.
| char const* __url__ = "http://www.schunk.com" |
Definition at line 102 of file demo-contact-grasping.cpp.
| char const* __version__ = "$Id: demo-contact-grasping.cpp 10894 2013-11-11 13:58:38Z Osswald2 $" |
Definition at line 103 of file demo-contact-grasping.cpp.
| cDBG cdbg(false,"red") |
| char const* usage |
Definition at line 109 of file demo-contact-grasping.cpp.