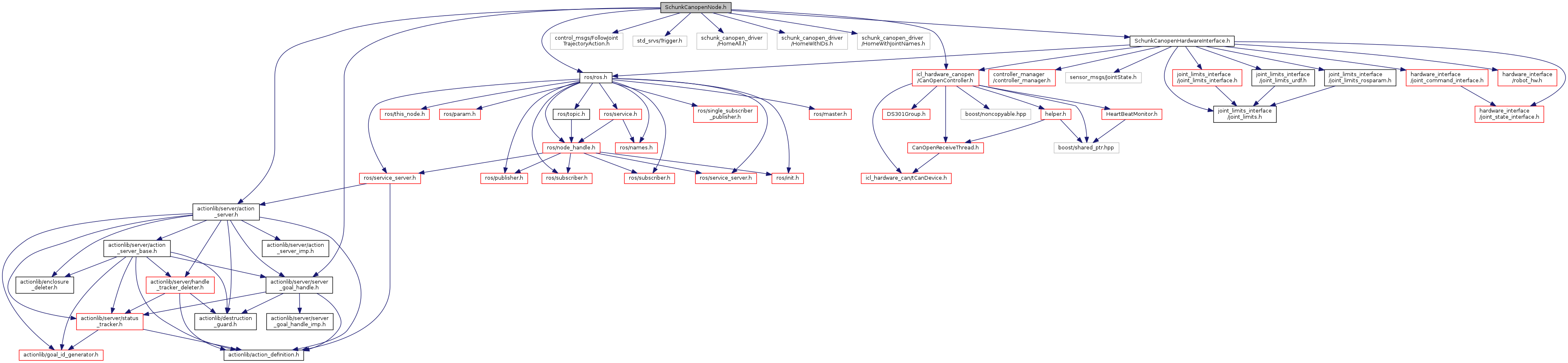
#include <ros/ros.h>#include "control_msgs/FollowJointTrajectoryAction.h"#include "actionlib/server/action_server.h"#include "actionlib/server/server_goal_handle.h"#include "std_srvs/Trigger.h"#include "schunk_canopen_driver/HomeAll.h"#include "schunk_canopen_driver/HomeWithIDs.h"#include "schunk_canopen_driver/HomeWithJointNames.h"#include "SchunkCanopenHardwareInterface.h"#include <icl_hardware_canopen/CanOpenController.h>
Include dependency graph for SchunkCanopenNode.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | SchunkCanopenNode |
Detailed Description
- Date
- 2015-12-3
Definition in file SchunkCanopenNode.h.