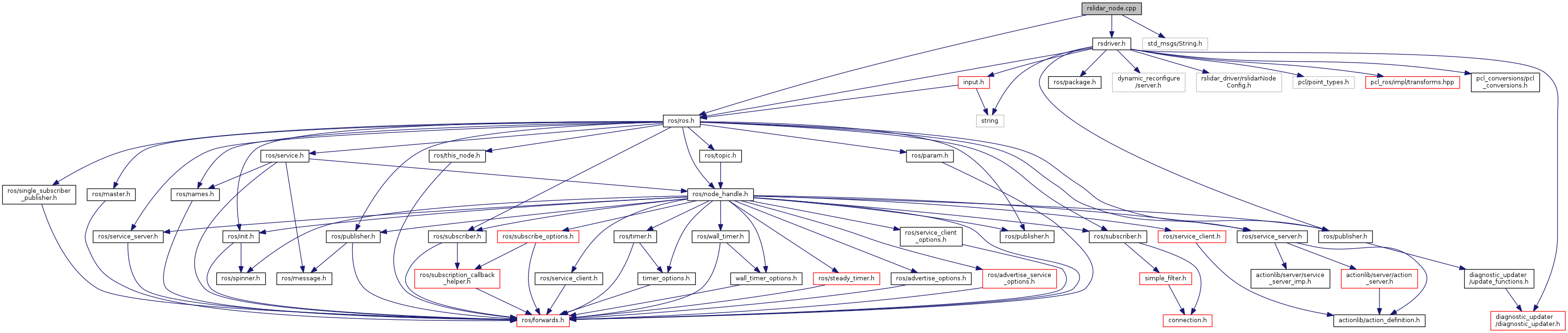
Include dependency graph for rslidar_node.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| static void | my_handler (int sig) |
Variables | |
| volatile sig_atomic_t | flag = 1 |
Detailed Description
ROS driver node for the Robosense 3D LIDARs.
Definition in file rslidar_node.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 62 of file rslidar_node.cpp.
|
static |
Definition at line 57 of file rslidar_node.cpp.
Variable Documentation
| volatile sig_atomic_t flag = 1 |
Definition at line 55 of file rslidar_node.cpp.