RobotActivity class implements ROS node lifecycle. More...
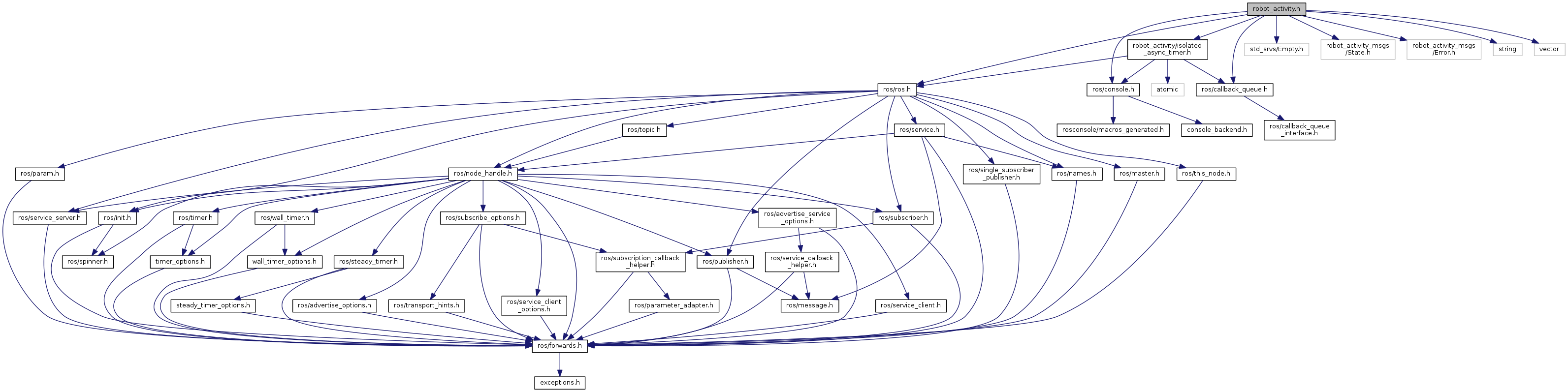
#include <ros/ros.h>#include <ros/console.h>#include <ros/callback_queue.h>#include <std_srvs/Empty.h>#include <robot_activity_msgs/State.h>#include <robot_activity_msgs/Error.h>#include <robot_activity/isolated_async_timer.h>#include <string>#include <vector>
Include dependency graph for robot_activity.h:
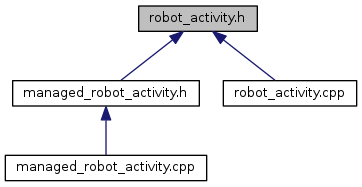
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robot_activity::RobotActivity |
| Class for adding node lifecycle to ROS processes. More... | |
Namespaces | |
| robot_activity | |
Enumerations | |
| enum | robot_activity::State : std::uint8_t { robot_activity::State::INVALID = robot_activity_msgs::State::INVALID, robot_activity::State::LAUNCHING = robot_activity_msgs::State::LAUNCHING, robot_activity::State::UNCONFIGURED = robot_activity_msgs::State::UNCONFIGURED, robot_activity::State::STOPPED = robot_activity_msgs::State::STOPPED, robot_activity::State::PAUSED = robot_activity_msgs::State::PAUSED, robot_activity::State::RUNNING = robot_activity_msgs::State::RUNNING, robot_activity::State::TERMINATED = robot_activity_msgs::State::TERMINATED, robot_activity::State::Count = 7 } |
| RobotActivity state enum. More... | |
Functions | |
| std::ostream & | robot_activity::operator<< (std::ostream &os, State state) |
| Overridden operator<< for easy State enum printing. More... | |
Detailed Description
RobotActivity class implements ROS node lifecycle.
- Date
- 01/03/2018
Definition in file robot_activity.h.