|
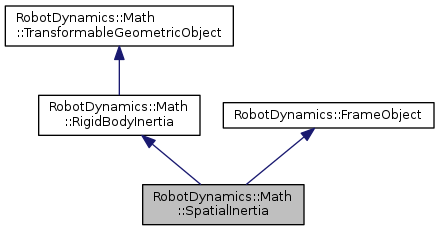
| TransformableGeometricObject * | getTransformableGeometricObject () |
| | Pure virtual method that FrameObjects are required to implement so the FrameObject::changeFrame method is able to access the TransformableGeometricObject which is required to implement the TransformableGeometricObject::transform method. More...
|
| |
| RobotDynamics::Math::SpatialForce | operator* (const RobotDynamics::Math::SpatialAcceleration &a) |
| |
| void | operator+= (const SpatialInertia &spatialInertia) |
| | Overloaded += operator. Performs frame checks. More...
|
| |
| | SpatialInertia () |
| | Empty constructor. Initializes FrameObject::referenceFrame to nullptr. More...
|
| |
| | SpatialInertia (ReferenceFramePtr referenceFrame) |
| | Constructor. More...
|
| |
| | SpatialInertia (ReferenceFramePtr referenceFrame, double mass, const Vector3d &com_mass, const Matrix3d &inertia) |
| | Constructor. More...
|
| |
| | SpatialInertia (ReferenceFramePtr referenceFrame, double m, const Vector3d &h, const double Ixx, const double Iyx, const double Iyy, const double Izx, const double Izy, const double Izz) |
| | Constructor. More...
|
| |
| | SpatialInertia (ReferenceFramePtr referenceFrame, const RigidBodyInertia &inertia) |
| | Constructor. More...
|
| |
| | SpatialInertia (const SpatialInertia &inertia) |
| | Copy constructor. More...
|
| |
| RigidBodyInertia | toRigidBodyInertia () const |
| | Get a copy of a Math::SpatialInertia as type Math::RigidBodyInertia. More...
|
| |
 Public Member Functions inherited from RobotDynamics::Math::RigidBodyInertia Public Member Functions inherited from RobotDynamics::Math::RigidBodyInertia |
| void | createFromMatrix (const SpatialMatrix &Ic) |
| | Create a Math::RigidBodyInertia object from a 6x6 Math::SpatialMatrix. More...
|
| |
| Matrix63 | multiplyMatrix63 (Matrix63 m) const |
| | A helper method that returns a 6x3 matrix that is a Math::RigidBodyInertia multiplied by a 6x3 matrix. More...
|
| |
| void | operator+= (const RigidBodyInertia &rbi) |
| | Overloaded plus-equals operator. Adds two inertia matrices. More...
|
| |
| RigidBodyInertia & | operator= (const RigidBodyInertia &other) |
| |
| | RigidBodyInertia () |
| | Constructor. More...
|
| |
| | RigidBodyInertia (double mass, const Vector3d &com_mass, const Matrix3d &inertia) |
| | Constructor. More...
|
| |
| | RigidBodyInertia (double m, const Vector3d &h, const double Ixx, const double Iyx, const double Iyy, const double Izx, const double Izy, const double Izz) |
| | Constructor. More...
|
| |
| | RigidBodyInertia (const RigidBodyInertia &inertia) |
| | Copy constructor. More...
|
| |
| void | set (const RigidBodyInertia &I) |
| | Setter. More...
|
| |
| void | set (double m, const Vector3d &h, const double Ixx, const double Iyx, const double Iyy, const double Izx, const double Izy, const double Izz) |
| | Setter. More...
|
| |
| void | setSpatialMatrix (SpatialMatrix &mat) const |
| | Store a Math::RigidBodyInertia in the Math::SpatialMatrix. More...
|
| |
| SpatialMatrix | subtractSpatialMatrix (const SpatialMatrix &m) const |
| | Given Math::RigidBodyInertia  ad Math::SpatialMatrix ad Math::SpatialMatrix  , returns Math::SpatialMatrix , returns Math::SpatialMatrix  such that such that  . More... . More...
|
| |
| SpatialVector | timesSpatialVector (const SpatialVector &v) const |
| | Multiply a Math::RigidBodyInertia by a Math::SpatialVector and return the result as a new Math::SpatialVector. More...
|
| |
| SpatialMatrix | toMatrix () const |
| |
| void | transform (const SpatialTransform &X) |
| | Transform a Math::RigidBodyInertia matrix. More...
|
| |
| RigidBodyInertia | transform_copy (const SpatialTransform &X) const |
| | Copy, transform, and return a Math::RigidBodyInertia. More...
|
| |
| virtual void | changeFrame (ReferenceFramePtr desiredFrame) |
| | Change the ReferenceFrame this FrameObject is expressed in. More...
|
| |
| void | checkReferenceFramesMatch (const FrameObject *frameObject) const |
| | Check if two ReferenceFrameHolders hold the same ReferenceFrame. More...
|
| |
| void | checkReferenceFramesMatch (FrameObject *frameObject) const |
| |
| | FrameObject (ReferenceFramePtr referenceFrame) |
| |
| ReferenceFramePtr | getReferenceFrame () const |
| | Get a pointer to the reference frame this FrameObject is expressed in. More...
|
| |
| void | setReferenceFrame (ReferenceFramePtr frame) |
| | Set frame objects internal reference frame. More...
|
| |
| virtual | ~FrameObject () |
| | Destructor. More...
|
| |