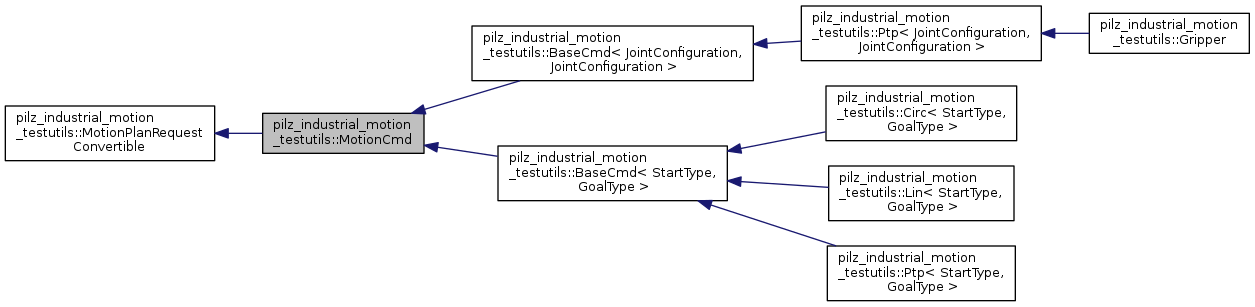
Base class for commands storing all general information of a command.
More...
#include <motioncmd.h>
Base class for commands storing all general information of a command.
Definition at line 31 of file motioncmd.h.
| pilz_industrial_motion_testutils::MotionCmd::MotionCmd |
( |
| ) |
|
|
inline |
| const std::string & pilz_industrial_motion_testutils::MotionCmd::getPlanningGroup |
( |
| ) |
const |
|
inline |
| void pilz_industrial_motion_testutils::MotionCmd::setAccelerationScale |
( |
double |
acceleration_scale | ) |
|
|
inline |
| void pilz_industrial_motion_testutils::MotionCmd::setPlanningGroup |
( |
const std::string & |
planning_group | ) |
|
|
inline |
| void pilz_industrial_motion_testutils::MotionCmd::setVelocityScale |
( |
double |
velocity_scale | ) |
|
|
inline |
| double pilz_industrial_motion_testutils::MotionCmd::acc_scale_ {1.0} |
|
protected |
| std::string pilz_industrial_motion_testutils::MotionCmd::planning_group_ |
|
protected |
| std::string pilz_industrial_motion_testutils::MotionCmd::target_link_ |
|
protected |
Link to which all cartesian poses refer to.
Definition at line 49 of file motioncmd.h.
| double pilz_industrial_motion_testutils::MotionCmd::vel_scale_ {1.0} |
|
protected |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from pilz_industrial_motion_testutils::MotionPlanRequestConvertible
Public Member Functions inherited from pilz_industrial_motion_testutils::MotionPlanRequestConvertible