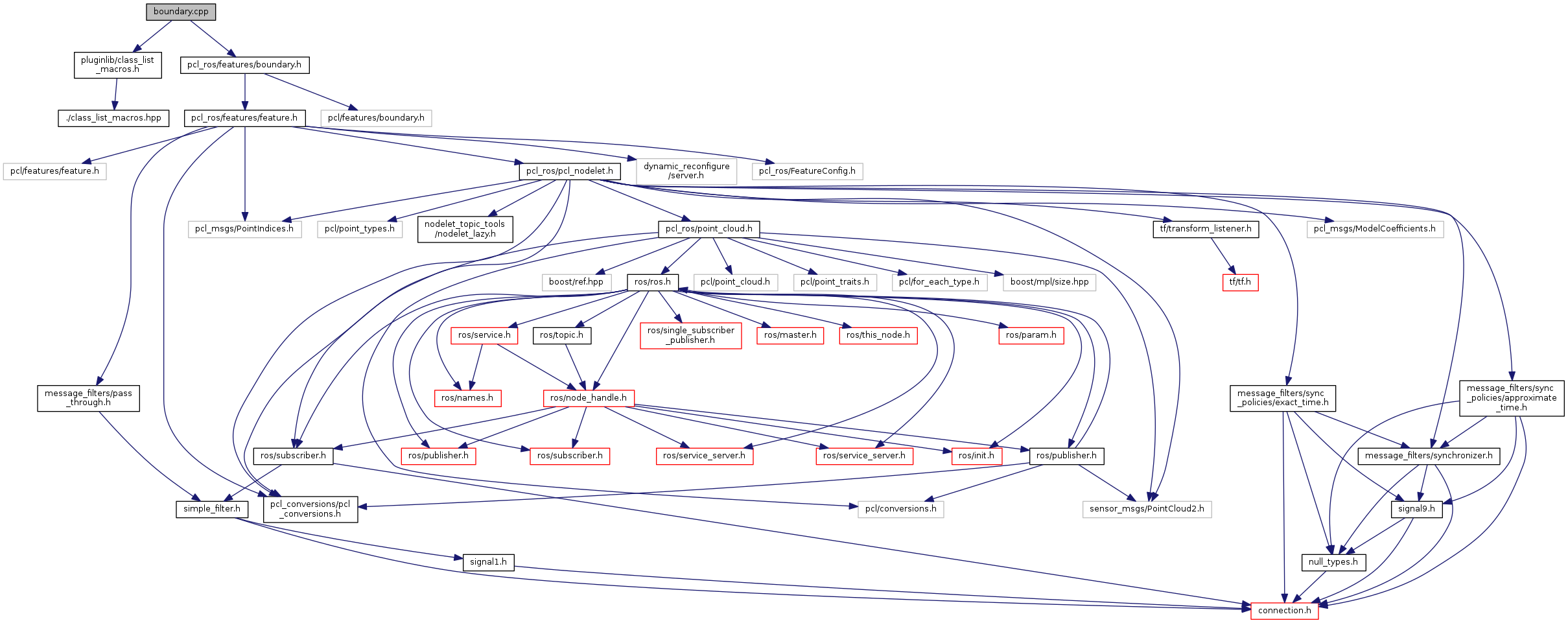
Include dependency graph for features/boundary.cpp:
Go to the source code of this file.
Typedefs | |
| typedef pcl_ros::BoundaryEstimation | BoundaryEstimation |
Typedef Documentation
Definition at line 73 of file features/boundary.cpp.
Go to the source code of this file.
Typedefs | |
| typedef pcl_ros::BoundaryEstimation | BoundaryEstimation |
Definition at line 73 of file features/boundary.cpp.