#include <AbstractOccupancyOcTree.h>
Public Member Functions | |
| AbstractOccupancyOcTree () | |
| double | getClampingThresMax () const |
| float | getClampingThresMaxLog () const |
| double | getClampingThresMin () const |
| float | getClampingThresMinLog () const |
| double | getOccupancyThres () const |
| float | getOccupancyThresLog () const |
| double | getProbHit () const |
| float | getProbHitLog () const |
| double | getProbMiss () const |
| float | getProbMissLog () const |
| bool | isNodeAtThreshold (const OcTreeNode *occupancyNode) const |
| queries whether a node is at the clamping threshold according to the tree's parameter More... | |
| bool | isNodeAtThreshold (const OcTreeNode &occupancyNode) const |
| queries whether a node is at the clamping threshold according to the tree's parameter More... | |
| bool | isNodeOccupied (const OcTreeNode *occupancyNode) const |
| queries whether a node is occupied according to the tree's parameter for "occupancy" More... | |
| bool | isNodeOccupied (const OcTreeNode &occupancyNode) const |
| queries whether a node is occupied according to the tree's parameter for "occupancy" More... | |
| bool | readBinary (std::istream &s) |
| bool | readBinary (const std::string &filename) |
| virtual std::istream & | readBinaryData (std::istream &s)=0 |
| Reads the actual data, implemented in OccupancyOcTreeBase::readBinaryData() More... | |
| void | setClampingThresMax (double thresProb) |
| sets the maximum threshold for occupancy clamping (sensor model) More... | |
| void | setClampingThresMin (double thresProb) |
| sets the minimum threshold for occupancy clamping (sensor model) More... | |
| void | setOccupancyThres (double prob) |
| sets the threshold for occupancy (sensor model) More... | |
| void | setProbHit (double prob) |
| sets the probability for a "hit" (will be converted to logodds) - sensor model More... | |
| void | setProbMiss (double prob) |
| sets the probability for a "miss" (will be converted to logodds) - sensor model More... | |
| virtual void | toMaxLikelihood ()=0 |
| virtual OcTreeNode * | updateNode (const OcTreeKey &key, float log_odds_update, bool lazy_eval=false)=0 |
| virtual OcTreeNode * | updateNode (const point3d &value, float log_odds_update, bool lazy_eval=false)=0 |
| virtual OcTreeNode * | updateNode (const OcTreeKey &key, bool occupied, bool lazy_eval=false)=0 |
| virtual OcTreeNode * | updateNode (const point3d &value, bool occupied, bool lazy_eval=false)=0 |
| bool | writeBinary (const std::string &filename) |
| bool | writeBinary (std::ostream &s) |
| bool | writeBinaryConst (const std::string &filename) const |
| bool | writeBinaryConst (std::ostream &s) const |
| virtual std::ostream & | writeBinaryData (std::ostream &s) const =0 |
| Writes the actual data, implemented in OccupancyOcTreeBase::writeBinaryData() More... | |
| virtual | ~AbstractOccupancyOcTree () |
 Public Member Functions inherited from octomap::AbstractOcTree Public Member Functions inherited from octomap::AbstractOcTree | |
| AbstractOcTree () | |
| virtual void | clear ()=0 |
| virtual AbstractOcTree * | create () const =0 |
| virtual constructor: creates a new object of same type More... | |
| virtual void | expand ()=0 |
| virtual void | getMetricMax (double &x, double &y, double &z)=0 |
| virtual void | getMetricMax (double &x, double &y, double &z) const =0 |
| virtual void | getMetricMin (double &x, double &y, double &z)=0 |
| virtual void | getMetricMin (double &x, double &y, double &z) const =0 |
| virtual void | getMetricSize (double &x, double &y, double &z)=0 |
| virtual double | getResolution () const =0 |
| virtual std::string | getTreeType () const =0 |
| returns actual class name as string for identification More... | |
| virtual size_t | memoryUsage () const =0 |
| virtual size_t | memoryUsageNode () const =0 |
| virtual void | prune ()=0 |
| virtual std::istream & | readData (std::istream &s)=0 |
| virtual void | setResolution (double res)=0 |
| virtual size_t | size () const =0 |
| bool | write (const std::string &filename) const |
| Write file header and complete tree to file (serialization) More... | |
| bool | write (std::ostream &s) const |
| Write file header and complete tree to stream (serialization) More... | |
| virtual std::ostream & | writeData (std::ostream &s) const =0 |
| virtual | ~AbstractOcTree () |
Protected Member Functions | |
| bool | readBinaryLegacyHeader (std::istream &s, unsigned int &size, double &res) |
| Try to read the old binary format for conversion, will be removed in the future. More... | |
Protected Attributes | |
| float | clamping_thres_max |
| float | clamping_thres_min |
| float | occ_prob_thres_log |
| float | prob_hit_log |
| float | prob_miss_log |
Static Protected Attributes | |
| static const std::string | binaryFileHeader = "# Octomap OcTree binary file" |
| Static Protected Attributes inherited from octomap::AbstractOcTree | |
| static const std::string | fileHeader = "# Octomap OcTree file" |
Additional Inherited Members | |
| Static Public Member Functions inherited from octomap::AbstractOcTree | |
| static AbstractOcTree * | createTree (const std::string id, double res) |
| static AbstractOcTree * | read (const std::string &filename) |
| static AbstractOcTree * | read (std::istream &s) |
| Static Protected Member Functions inherited from octomap::AbstractOcTree | |
| static bool | readHeader (std::istream &s, std::string &id, unsigned &size, double &res) |
| static void | registerTreeType (AbstractOcTree *tree) |
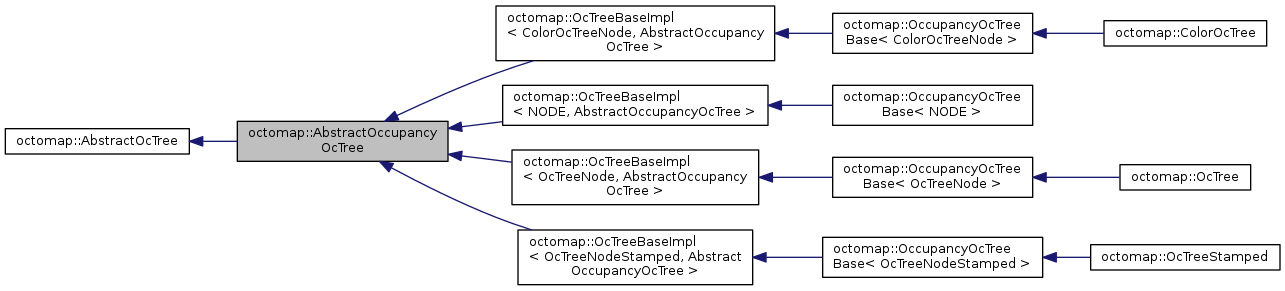
Detailed Description
Interface class for all octree types that store occupancy. This serves as a common base class e.g. for polymorphism and contains common code for reading and writing binary trees.
Definition at line 52 of file AbstractOccupancyOcTree.h.
Constructor & Destructor Documentation
| octomap::AbstractOccupancyOcTree::AbstractOccupancyOcTree | ( | ) |
Definition at line 40 of file AbstractOccupancyOcTree.cpp.
|
inlinevirtual |
Definition at line 55 of file AbstractOccupancyOcTree.h.
Member Function Documentation
|
inline |
- Returns
- maximum threshold for occupancy clamping in the sensor model (probability)
Definition at line 217 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- maximum threshold for occupancy clamping in the sensor model (logodds)
Definition at line 219 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- minimum threshold for occupancy clamping in the sensor model (probability)
Definition at line 213 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- minimum threshold for occupancy clamping in the sensor model (logodds)
Definition at line 215 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- threshold (probability) for occupancy - sensor model
Definition at line 199 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- threshold (logodds) for occupancy - sensor model
Definition at line 201 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- probability for a "hit" in the sensor model (probability)
Definition at line 204 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- probability for a "hit" in the sensor model (logodds)
Definition at line 206 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- probability for a "miss" in the sensor model (probability)
Definition at line 208 of file AbstractOccupancyOcTree.h.
|
inline |
- Returns
- probability for a "miss" in the sensor model (logodds)
Definition at line 210 of file AbstractOccupancyOcTree.h.
|
inline |
queries whether a node is at the clamping threshold according to the tree's parameter
Definition at line 124 of file AbstractOccupancyOcTree.h.
|
inline |
queries whether a node is at the clamping threshold according to the tree's parameter
Definition at line 130 of file AbstractOccupancyOcTree.h.
|
inline |
queries whether a node is occupied according to the tree's parameter for "occupancy"
Definition at line 114 of file AbstractOccupancyOcTree.h.
|
inline |
queries whether a node is occupied according to the tree's parameter for "occupancy"
Definition at line 119 of file AbstractOccupancyOcTree.h.
| bool octomap::AbstractOccupancyOcTree::readBinary | ( | std::istream & | s | ) |
Reads an OcTree from an input stream. Existing nodes of the tree are deleted before the tree is read.
- Returns
- success of operation
Definition at line 135 of file AbstractOccupancyOcTree.cpp.
| bool octomap::AbstractOccupancyOcTree::readBinary | ( | const std::string & | filename | ) |
Reads OcTree from a binary file. Existing nodes of the tree are deleted before the tree is read.
- Returns
- success of operation
Definition at line 126 of file AbstractOccupancyOcTree.cpp.
|
pure virtual |
Reads the actual data, implemented in OccupancyOcTreeBase::readBinaryData()
Implemented in octomap::OccupancyOcTreeBase< NODE >, octomap::OccupancyOcTreeBase< ColorOcTreeNode >, octomap::OccupancyOcTreeBase< OcTreeNode >, and octomap::OccupancyOcTreeBase< OcTreeNodeStamped >.
|
protected |
Try to read the old binary format for conversion, will be removed in the future.
Definition at line 98 of file AbstractOccupancyOcTree.cpp.
|
inline |
sets the maximum threshold for occupancy clamping (sensor model)
Definition at line 196 of file AbstractOccupancyOcTree.h.
|
inline |
sets the minimum threshold for occupancy clamping (sensor model)
Definition at line 194 of file AbstractOccupancyOcTree.h.
|
inline |
sets the threshold for occupancy (sensor model)
Definition at line 188 of file AbstractOccupancyOcTree.h.
|
inline |
sets the probability for a "hit" (will be converted to logodds) - sensor model
Definition at line 190 of file AbstractOccupancyOcTree.h.
|
inline |
sets the probability for a "miss" (will be converted to logodds) - sensor model
Definition at line 192 of file AbstractOccupancyOcTree.h.
|
pure virtual |
|
pure virtual |
Manipulate log_odds value of voxel directly
- Parameters
-
key of the NODE that is to be updated log_odds_update value to be added (+) to log_odds value of node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implemented in octomap::OccupancyOcTreeBase< NODE >, octomap::OccupancyOcTreeBase< ColorOcTreeNode >, octomap::OccupancyOcTreeBase< OcTreeNode >, and octomap::OccupancyOcTreeBase< OcTreeNodeStamped >.
|
pure virtual |
Manipulate log_odds value of voxel directly. Looks up the OcTreeKey corresponding to the coordinate and then calls udpateNode() with it.
- Parameters
-
value 3d coordinate of the NODE that is to be updated log_odds_update value to be added (+) to log_odds value of node lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implemented in octomap::OccupancyOcTreeBase< NODE >, octomap::OccupancyOcTreeBase< ColorOcTreeNode >, octomap::OccupancyOcTreeBase< OcTreeNode >, and octomap::OccupancyOcTreeBase< OcTreeNodeStamped >.
|
pure virtual |
Integrate occupancy measurement.
- Parameters
-
key of the NODE that is to be updated occupied true if the node was measured occupied, else false lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implemented in octomap::OccupancyOcTreeBase< NODE >, octomap::OccupancyOcTreeBase< ColorOcTreeNode >, octomap::OccupancyOcTreeBase< OcTreeNode >, and octomap::OccupancyOcTreeBase< OcTreeNodeStamped >.
|
pure virtual |
Integrate occupancy measurement. Looks up the OcTreeKey corresponding to the coordinate and then calls udpateNode() with it.
- Parameters
-
value 3d coordinate of the NODE that is to be updated occupied true if the node was measured occupied, else false lazy_eval whether update of inner nodes is omitted after the update (default: false). This speeds up the insertion, but you need to call updateInnerOccupancy() when done.
- Returns
- pointer to the updated NODE
Implemented in octomap::OccupancyOcTreeBase< NODE >, octomap::OccupancyOcTreeBase< ColorOcTreeNode >, octomap::OccupancyOcTreeBase< OcTreeNode >, and octomap::OccupancyOcTreeBase< OcTreeNodeStamped >.
| bool octomap::AbstractOccupancyOcTree::writeBinary | ( | const std::string & | filename | ) |
Writes OcTree to a binary file using writeBinary(). The OcTree is first converted to the maximum likelihood estimate and pruned.
- Returns
- success of operation
Definition at line 50 of file AbstractOccupancyOcTree.cpp.
| bool octomap::AbstractOccupancyOcTree::writeBinary | ( | std::ostream & | s | ) |
Writes compressed maximum likelihood OcTree to a binary stream. The OcTree is first converted to the maximum likelihood estimate and pruned for maximum compression.
- Returns
- success of operation
Definition at line 72 of file AbstractOccupancyOcTree.cpp.
| bool octomap::AbstractOccupancyOcTree::writeBinaryConst | ( | const std::string & | filename | ) | const |
Writes OcTree to a binary file using writeBinaryConst(). The OcTree is not changed, in particular not pruned first. Files will be smaller when the tree is pruned first or by using writeBinary() instead.
- Returns
- success of operation
Definition at line 60 of file AbstractOccupancyOcTree.cpp.
| bool octomap::AbstractOccupancyOcTree::writeBinaryConst | ( | std::ostream & | s | ) | const |
Writes the maximum likelihood OcTree to a binary stream (const variant). Files will be smaller when the tree is pruned first or by using writeBinary() instead.
- Returns
- success of operation
Definition at line 79 of file AbstractOccupancyOcTree.cpp.
|
pure virtual |
Writes the actual data, implemented in OccupancyOcTreeBase::writeBinaryData()
Implemented in octomap::OccupancyOcTreeBase< NODE >, octomap::OccupancyOcTreeBase< ColorOcTreeNode >, octomap::OccupancyOcTreeBase< OcTreeNode >, and octomap::OccupancyOcTreeBase< OcTreeNodeStamped >.
Member Data Documentation
|
staticprotected |
Definition at line 235 of file AbstractOccupancyOcTree.h.
|
protected |
Definition at line 230 of file AbstractOccupancyOcTree.h.
|
protected |
Definition at line 229 of file AbstractOccupancyOcTree.h.
|
protected |
Definition at line 233 of file AbstractOccupancyOcTree.h.
|
protected |
Definition at line 231 of file AbstractOccupancyOcTree.h.
|
protected |
Definition at line 232 of file AbstractOccupancyOcTree.h.
The documentation for this class was generated from the following files: