#include <ros/callback_queue.h>#include "mrpt_graphslam_2d/CGraphSlamEngine_ROS.h"#include "mrpt_graphslam_2d/interfaces/CRegistrationDeciderOrOptimizer_MR.h"#include "mrpt_graphslam_2d/interfaces/CEdgeRegistrationDecider_MR.h"#include "mrpt_graphslam_2d/CConnectionManager.h"#include "mrpt_graphslam_2d/misc/common.h"#include <mrpt_msgs/NodeIDWithLaserScan.h>#include <mrpt_msgs/NodeIDWithPose_vec.h>#include <mrpt_msgs/NetworkOfPoses.h>#include <mrpt_msgs/GetCMGraph.h>#include <mrpt_bridge/network_of_poses.h>#include <mrpt_bridge/laser_scan.h>#include <sensor_msgs/LaserScan.h>#include <std_msgs/String.h>#include <mrpt/poses/CPosePDFGaussian.h>#include <mrpt/poses/CPosePDFSOG.h>#include <mrpt/math/utils.h>#include <mrpt/system/os.h>#include <mrpt/slam/CGridMapAligner.h>#include <mrpt/graphs/TMRSlamNodeAnnotations.h>#include <mrpt/graphslam/misc/TUncertaintyPath.h>#include <mrpt/graphslam/misc/TNodeProps.h>#include <mrpt/version.h>#include <mrpt/utils/TColorManager.h>#include <set>#include <iterator>#include <algorithm>#include "mrpt_graphslam_2d/CGraphSlamEngine_MR_impl.h"
Include dependency graph for CGraphSlamEngine_MR.h:

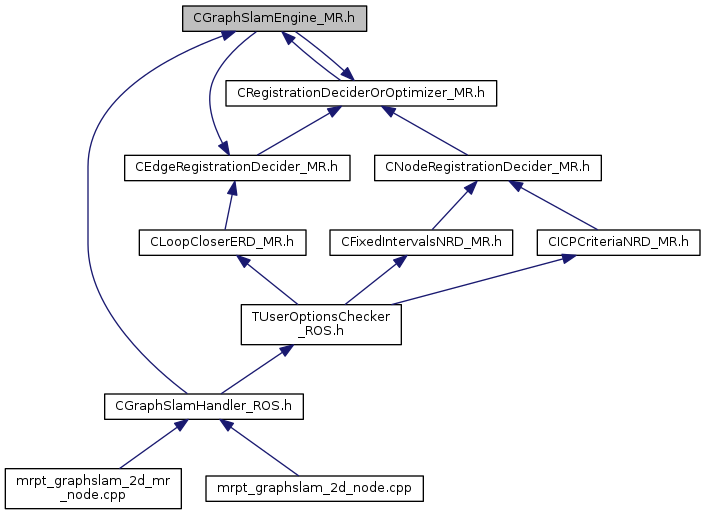
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::graphslam::CGraphSlamEngine_MR< GRAPH_T > |
| mrpt::graphslam::CGraphSlamEngine derived class for executing multi-robot graphSLAM More... | |
| struct | mrpt::graphslam::CGraphSlamEngine_MR< GRAPH_T >::TNeighborAgentProps |
| Struct responsible for holding properties (nodeIDs, node positions, LaserScans) that have been registered by a nearby GraphSlamAgent. More... | |
| struct | mrpt::graphslam::CGraphSlamEngine_MR< GRAPH_T >::TOptions |
Namespaces | |
| mrpt | |
| mrpt::graphslam | |