Public Member Functions | |
| def | __init__ (self, fd, address, source_system=255, source_component=0, notimestamps=False, input=True, use_native=default_native) |
| def | arducopter_arm (self) |
| def | arducopter_disarm (self) |
| def | auto_mavlink_version (self, buf) |
| def | base_mode (self) |
| def | base_mode (self, value) |
| def | calibrate_level (self) |
| def | calibrate_pressure (self) |
| def | check_condition (self, condition) |
| def | close (self, n=None) |
| def | disable_signing (self) |
| def | field (self, type, field, default=None) |
| def | flightmode (self) |
| def | flightmode (self, value) |
| def | location (self, relative_alt=False) |
| def | mav_type (self) |
| def | mav_type (self, value) |
| def | mavlink10 (self) |
| def | mavlink20 (self) |
| def | messages (self) |
| def | mode_mapping (self) |
| def | motors_armed (self) |
| def | motors_armed_wait (self) |
| def | motors_disarmed_wait (self) |
| def | packet_loss (self) |
| def | param (self, name, default=None) |
| def | param_fetch_all (self) |
| def | param_fetch_one (self, name) |
| def | param_set_send (self, parm_name, parm_value, parm_type=None) |
| def | params (self) |
| def | post_message (self, msg) |
| def | pre_message (self) |
| def | probably_vehicle_heartbeat (self, msg) |
| def | reboot_autopilot (self, hold_in_bootloader=False) |
| def | recv (self, n=None) |
| def | recv_match (self, condition=None, type=None, blocking=False, timeout=None) |
| def | recv_msg (self) |
| def | select (self, timeout) |
| def | set_mode (self, mode, custom_mode=0, custom_sub_mode=0) |
| def | set_mode_apm (self, mode, custom_mode=0, custom_sub_mode=0) |
| def | set_mode_auto (self) |
| def | set_mode_fbwa (self) |
| def | set_mode_flag (self, flag, enable) |
| def | set_mode_loiter (self) |
| def | set_mode_manual (self) |
| def | set_mode_px4 (self, mode, custom_mode, custom_sub_mode) |
| def | set_mode_rtl (self) |
| def | set_relay (self, relay_pin=0, state=True) |
| def | set_rtscts (self, enable) |
| def | set_servo (self, channel, pwm) |
| def | setup_logfile (self, logfile, mode='w') |
| def | setup_logfile_raw (self, logfile, mode='w') |
| def | setup_signing (self, secret_key, sign_outgoing=True, allow_unsigned_callback=None, initial_timestamp=None, link_id=None) |
| def | target_component (self) |
| def | target_component (self, value) |
| def | target_system (self) |
| def | target_system (self, value) |
| def | time_since (self, mtype) |
| def | vehicle_type (self) |
| def | vehicle_type (self, value) |
| def | wait_gps_fix (self) |
| def | wait_heartbeat (self, blocking=True, timeout=None) |
| def | waypoint_clear_all_send (self) |
| def | waypoint_count_send (self, seq) |
| def | waypoint_current (self) |
| def | waypoint_request_list_send (self) |
| def | waypoint_request_send (self, seq) |
| def | waypoint_set_current_send (self, seq) |
| def | write (self, buf) |
Private Attributes | |
| _timestamp | |
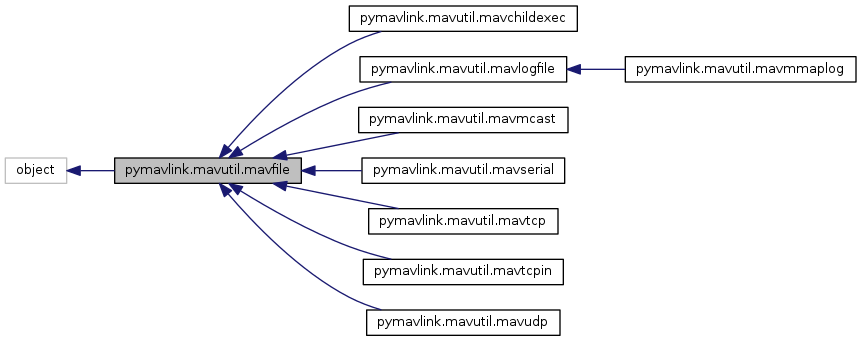
Detailed Description
a generic mavlink port
Definition at line 133 of file mavutil.py.
Constructor & Destructor Documentation
| def pymavlink.mavutil.mavfile.__init__ | ( | self, | |
| fd, | |||
| address, | |||
source_system = 255, |
|||
source_component = 0, |
|||
notimestamps = False, |
|||
input = True, |
|||
use_native = default_native |
|||
| ) |
Definition at line 135 of file mavutil.py.
Member Function Documentation
| def pymavlink.mavutil.mavfile.arducopter_arm | ( | self | ) |
arm motors (arducopter only)
Definition at line 791 of file mavutil.py.
| def pymavlink.mavutil.mavfile.arducopter_disarm | ( | self | ) |
calibrate pressure
Definition at line 807 of file mavutil.py.
| def pymavlink.mavutil.mavfile.auto_mavlink_version | ( | self, | |
| buf | |||
| ) |
auto-switch mavlink protocol version
Definition at line 245 of file mavutil.py.
| def pymavlink.mavutil.mavfile.base_mode | ( | self | ) |
Definition at line 238 of file mavutil.py.
| def pymavlink.mavutil.mavfile.base_mode | ( | self, | |
| value | |||
| ) |
Definition at line 242 of file mavutil.py.
| def pymavlink.mavutil.mavfile.calibrate_level | ( | self | ) |
calibrate accels (1D version)
Definition at line 735 of file mavutil.py.
| def pymavlink.mavutil.mavfile.calibrate_pressure | ( | self | ) |
calibrate pressure
Definition at line 741 of file mavutil.py.
| def pymavlink.mavutil.mavfile.check_condition | ( | self, | |
| condition | |||
| ) |
check if a condition is true
Definition at line 474 of file mavutil.py.
| def pymavlink.mavutil.mavfile.close | ( | self, | |
n = None |
|||
| ) |
default close method
Definition at line 285 of file mavutil.py.
| def pymavlink.mavutil.mavfile.disable_signing | ( | self | ) |
disable MAVLink2 signing
Definition at line 876 of file mavutil.py.
| def pymavlink.mavutil.mavfile.field | ( | self, | |
| type, | |||
| field, | |||
default = None |
|||
| ) |
convenient function for returning an arbitrary MAVLink field with a default
Definition at line 842 of file mavutil.py.
| def pymavlink.mavutil.mavfile.flightmode | ( | self | ) |
Definition at line 214 of file mavutil.py.
| def pymavlink.mavutil.mavfile.flightmode | ( | self, | |
| value | |||
| ) |
Definition at line 218 of file mavutil.py.
| def pymavlink.mavutil.mavfile.location | ( | self, | |
relative_alt = False |
|||
| ) |
return current location
Definition at line 776 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mav_type | ( | self | ) |
Definition at line 230 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mav_type | ( | self, | |
| value | |||
| ) |
Definition at line 234 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mavlink10 | ( | self | ) |
return True if using MAVLink 1.0 or later
Definition at line 478 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mavlink20 | ( | self | ) |
return True if using MAVLink 2.0 or later
Definition at line 482 of file mavutil.py.
| def pymavlink.mavutil.mavfile.messages | ( | self | ) |
Definition at line 210 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mode_mapping | ( | self | ) |
return dictionary mapping mode names to numbers, or None if unknown
Definition at line 605 of file mavutil.py.
| def pymavlink.mavutil.mavfile.motors_armed | ( | self | ) |
return true if motors armed
Definition at line 823 of file mavutil.py.
| def pymavlink.mavutil.mavfile.motors_armed_wait | ( | self | ) |
wait for motors to be armed
Definition at line 827 of file mavutil.py.
| def pymavlink.mavutil.mavfile.motors_disarmed_wait | ( | self | ) |
wait for motors to be disarmed
Definition at line 834 of file mavutil.py.
| def pymavlink.mavutil.mavfile.packet_loss | ( | self | ) |
packet loss as a percentage
Definition at line 408 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param | ( | self, | |
| name, | |||
default = None |
|||
| ) |
convenient function for returning an arbitrary MAVLink parameter with a default
Definition at line 849 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param_fetch_all | ( | self | ) |
initiate fetch of all parameters
Definition at line 498 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param_fetch_one | ( | self, | |
| name | |||
| ) |
initiate fetch of one parameter
Definition at line 506 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param_set_send | ( | self, | |
| parm_name, | |||
| parm_value, | |||
parm_type = None |
|||
| ) |
wrapper for parameter set
Definition at line 522 of file mavutil.py.
| def pymavlink.mavutil.mavfile.params | ( | self | ) |
Definition at line 202 of file mavutil.py.
| def pymavlink.mavutil.mavfile.post_message | ( | self, | |
| msg | |||
| ) |
default post message call
Definition at line 323 of file mavutil.py.
| def pymavlink.mavutil.mavfile.pre_message | ( | self | ) |
default pre message call
Definition at line 305 of file mavutil.py.
| def pymavlink.mavutil.mavfile.probably_vehicle_heartbeat | ( | self, | |
| msg | |||
| ) |
Definition at line 313 of file mavutil.py.
| def pymavlink.mavutil.mavfile.reboot_autopilot | ( | self, | |
hold_in_bootloader = False |
|||
| ) |
reboot the autopilot
Definition at line 751 of file mavutil.py.
| def pymavlink.mavutil.mavfile.recv | ( | self, | |
n = None |
|||
| ) |
default recv method
Definition at line 281 of file mavutil.py.
| def pymavlink.mavutil.mavfile.recv_match | ( | self, | |
condition = None, |
|||
type = None, |
|||
blocking = False, |
|||
timeout = None |
|||
| ) |
recv the next MAVLink message that matches the given condition type can be a string or a list of strings
Definition at line 444 of file mavutil.py.
| def pymavlink.mavutil.mavfile.recv_msg | ( | self | ) |
message receive routine
Definition at line 415 of file mavutil.py.
| def pymavlink.mavutil.mavfile.select | ( | self, | |
| timeout | |||
| ) |
wait for up to timeout seconds for more data
Definition at line 294 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode | ( | self, | |
| mode, | |||
custom_mode = 0, |
|||
custom_sub_mode = 0 |
|||
| ) |
set arbitrary flight mode
Definition at line 662 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_apm | ( | self, | |
| mode, | |||
custom_mode = 0, |
|||
custom_sub_mode = 0 |
|||
| ) |
enter arbitrary mode
Definition at line 637 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_auto | ( | self | ) |
enter auto mode
Definition at line 596 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_fbwa | ( | self | ) |
enter FBWA mode
Definition at line 690 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_flag | ( | self, | |
| flag, | |||
| enable | |||
| ) |
Enables/ disables MAV_MODE_FLAG @param flag The mode flag, see MAV_MODE_FLAG enum @param enable Enable the flag, (True/False)
Definition at line 576 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_loiter | ( | self | ) |
enter LOITER mode
Definition at line 700 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_manual | ( | self | ) |
enter MANUAL mode
Definition at line 679 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_px4 | ( | self, | |
| mode, | |||
| custom_mode, | |||
| custom_sub_mode | |||
| ) |
enter arbitrary mode
Definition at line 650 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_rtl | ( | self | ) |
enter RTL mode
Definition at line 670 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_relay | ( | self, | |
relay_pin = 0, |
|||
state = True |
|||
| ) |
Set relay_pin to value of state
Definition at line 717 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_rtscts | ( | self, | |
| enable | |||
| ) |
enable/disable RTS/CTS if applicable
Definition at line 309 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_servo | ( | self, | |
| channel, | |||
| pwm | |||
| ) |
set a servo value
Definition at line 709 of file mavutil.py.
| def pymavlink.mavutil.mavfile.setup_logfile | ( | self, | |
| logfile, | |||
mode = 'w' |
|||
| ) |
start logging to the given logfile, with timestamps
Definition at line 486 of file mavutil.py.
| def pymavlink.mavutil.mavfile.setup_logfile_raw | ( | self, | |
| logfile, | |||
mode = 'w' |
|||
| ) |
start logging raw bytes to the given logfile, without timestamps
Definition at line 490 of file mavutil.py.
| def pymavlink.mavutil.mavfile.setup_signing | ( | self, | |
| secret_key, | |||
sign_outgoing = True, |
|||
allow_unsigned_callback = None, |
|||
initial_timestamp = None, |
|||
link_id = None |
|||
| ) |
setup for MAVLink2 signing
Definition at line 856 of file mavutil.py.
| def pymavlink.mavutil.mavfile.target_component | ( | self | ) |
Definition at line 181 of file mavutil.py.
| def pymavlink.mavutil.mavfile.target_component | ( | self, | |
| value | |||
| ) |
Definition at line 195 of file mavutil.py.
| def pymavlink.mavutil.mavfile.target_system | ( | self | ) |
Definition at line 177 of file mavutil.py.
| def pymavlink.mavutil.mavfile.target_system | ( | self, | |
| value | |||
| ) |
Definition at line 185 of file mavutil.py.
| def pymavlink.mavutil.mavfile.time_since | ( | self, | |
| mtype | |||
| ) |
return the time since the last message of type mtype was received
Definition at line 516 of file mavutil.py.
| def pymavlink.mavutil.mavfile.vehicle_type | ( | self | ) |
Definition at line 222 of file mavutil.py.
| def pymavlink.mavutil.mavfile.vehicle_type | ( | self, | |
| value | |||
| ) |
Definition at line 226 of file mavutil.py.
| def pymavlink.mavutil.mavfile.wait_gps_fix | ( | self | ) |
Definition at line 767 of file mavutil.py.
| def pymavlink.mavutil.mavfile.wait_heartbeat | ( | self, | |
blocking = True, |
|||
timeout = None |
|||
| ) |
wait for a heartbeat so we know the target system IDs
Definition at line 494 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_clear_all_send | ( | self | ) |
wrapper for waypoint_clear_all_send
Definition at line 540 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_count_send | ( | self, | |
| seq | |||
| ) |
wrapper for waypoint_count_send
Definition at line 569 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_current | ( | self | ) |
return current waypoint
Definition at line 561 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_request_list_send | ( | self | ) |
wrapper for waypoint_request_list_send
Definition at line 533 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_request_send | ( | self, | |
| seq | |||
| ) |
wrapper for waypoint_request_send
Definition at line 547 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_set_current_send | ( | self, | |
| seq | |||
| ) |
wrapper for waypoint_set_current_send
Definition at line 554 of file mavutil.py.
| def pymavlink.mavutil.mavfile.write | ( | self, | |
| buf | |||
| ) |
default write method
Definition at line 289 of file mavutil.py.
Member Data Documentation
|
private |
Definition at line 171 of file mavutil.py.
| pymavlink.mavutil.mavfile.address |
Definition at line 142 of file mavutil.py.
| pymavlink.mavutil.mavfile.base_mode |
Definition at line 381 of file mavutil.py.
| pymavlink.mavutil.mavfile.fd |
Definition at line 139 of file mavutil.py.
| pymavlink.mavutil.mavfile.first_byte |
Definition at line 160 of file mavutil.py.
| pymavlink.mavutil.mavfile.flightmode |
Definition at line 379 of file mavutil.py.
| pymavlink.mavutil.mavfile.idle_hooks |
Definition at line 168 of file mavutil.py.
| pymavlink.mavutil.mavfile.last_seq |
Definition at line 144 of file mavutil.py.
| pymavlink.mavutil.mavfile.logfile |
Definition at line 164 of file mavutil.py.
| pymavlink.mavutil.mavfile.logfile_raw |
Definition at line 165 of file mavutil.py.
| pymavlink.mavutil.mavfile.mav |
Definition at line 162 of file mavutil.py.
| pymavlink.mavutil.mavfile.mav_count |
Definition at line 146 of file mavutil.py.
| pymavlink.mavutil.mavfile.mav_loss |
Definition at line 145 of file mavutil.py.
| pymavlink.mavutil.mavfile.mav_type |
Definition at line 380 of file mavutil.py.
| pymavlink.mavutil.mavfile.message_hooks |
Definition at line 167 of file mavutil.py.
| pymavlink.mavutil.mavfile.notimestamps |
Definition at line 170 of file mavutil.py.
| pymavlink.mavutil.mavfile.param_fetch_start |
Definition at line 147 of file mavutil.py.
| pymavlink.mavutil.mavfile.param_state |
Definition at line 154 of file mavutil.py.
| pymavlink.mavutil.mavfile.param_sysid |
Definition at line 141 of file mavutil.py.
| pymavlink.mavutil.mavfile.portdead |
Definition at line 174 of file mavutil.py.
| pymavlink.mavutil.mavfile.robust_parsing |
Definition at line 161 of file mavutil.py.
| pymavlink.mavutil.mavfile.source_component |
Definition at line 159 of file mavutil.py.
| pymavlink.mavutil.mavfile.source_system |
Definition at line 158 of file mavutil.py.
| pymavlink.mavutil.mavfile.start_time |
Definition at line 166 of file mavutil.py.
| pymavlink.mavutil.mavfile.stop_on_EOF |
Definition at line 173 of file mavutil.py.
| pymavlink.mavutil.mavfile.sysid |
Definition at line 140 of file mavutil.py.
| pymavlink.mavutil.mavfile.sysid_state |
Definition at line 150 of file mavutil.py.
| pymavlink.mavutil.mavfile.target_component |
Definition at line 403 of file mavutil.py.
| pymavlink.mavutil.mavfile.target_system |
Definition at line 402 of file mavutil.py.
| pymavlink.mavutil.mavfile.timestamp |
Definition at line 143 of file mavutil.py.
| pymavlink.mavutil.mavfile.uptime |
Definition at line 169 of file mavutil.py.
| pymavlink.mavutil.mavfile.WIRE_PROTOCOL_VERSION |
Definition at line 172 of file mavutil.py.
The documentation for this class was generated from the following file: