#include <ros/ros.h>#include <trajectory_msgs/JointTrajectory.h>#include <std_srvs/Trigger.h>#include <sensor_msgs/JointState.h>#include <control_msgs/GripperCommandActionGoal.h>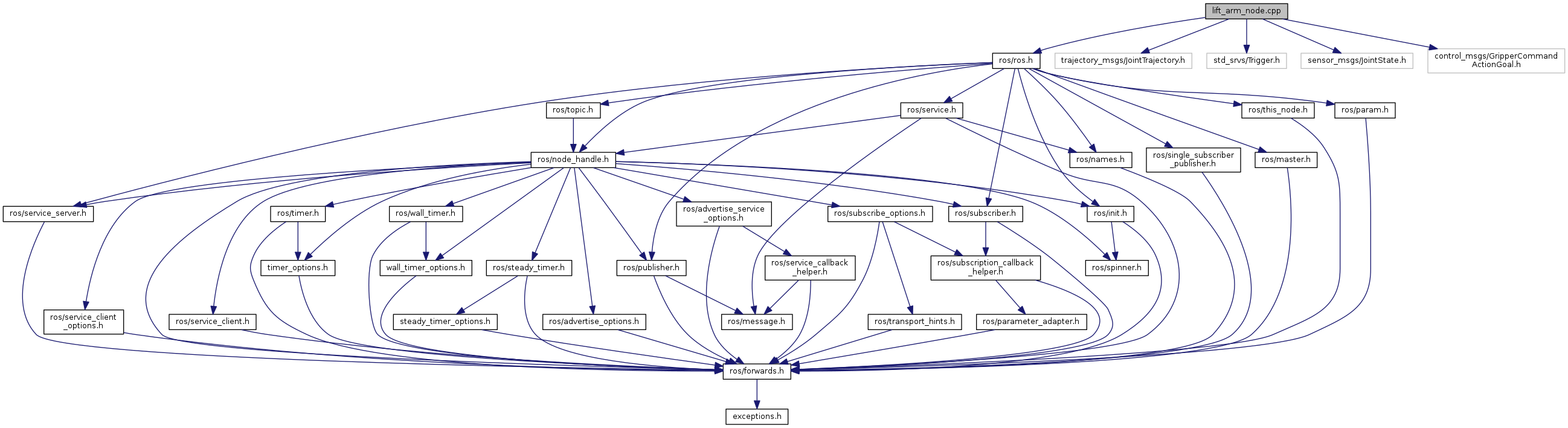
Go to the source code of this file.
Classes | |
| struct | arm_state |
Enumerations | |
| enum | ArmPose { INVALID, GRIPPER_TO_THE_RIGHT, GRIPPER_TO_THE_LEFT } |
Functions | |
| ArmPose | getArmPose () |
| void | jointsUpdateCB (const sensor_msgs::JointState::ConstPtr &msg) |
| bool | liftArmCB (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
| int | main (int argc, char **argv) |
| bool | openGripperCB (std_srvs::Trigger::Request &req, std_srvs::Trigger::Response &res) |
Variables | |
| arm_state | arm |
| ros::Publisher | arm_pub |
| ros::Publisher | gripper_pub |
| ros::Subscriber | joints_state_sub |
| ros::ServiceServer | lift_arm_srv |
| ros::ServiceServer | open_gripper_srv |
Macro Definition Documentation
| #define ROTATION1_JOINT_INDX 6 |
Definition at line 7 of file lift_arm_node.cpp.
| #define ROTATION1_JOINT_NAME "rotation1_joint" |
Definition at line 56 of file lift_arm_node.cpp.
| #define ROTATION1_RAD_GOAL_LEFT_POS 1.567 |
Definition at line 33 of file lift_arm_node.cpp.
| #define ROTATION1_RAD_GOAL_RIGHT_POS -1.567 |
Definition at line 42 of file lift_arm_node.cpp.
| #define ROTATION1_RAD_GOAL_VEL 0.1 |
Definition at line 49 of file lift_arm_node.cpp.
| #define ROTATION1_VALID_START_RAD_LEFT_POS 1.567 |
Definition at line 17 of file lift_arm_node.cpp.
| #define ROTATION1_VALID_START_RAD_RIGHT_POS -1.567 |
Definition at line 24 of file lift_arm_node.cpp.
| #define ROTATION2_JOINT_INDX 7 |
Definition at line 8 of file lift_arm_node.cpp.
| #define ROTATION2_JOINT_NAME "rotation2_joint" |
Definition at line 57 of file lift_arm_node.cpp.
| #define ROTATION2_RAD_GOAL_LEFT_POS 0.0 |
Definition at line 34 of file lift_arm_node.cpp.
| #define ROTATION2_RAD_GOAL_RIGHT_POS 0.0 |
Definition at line 43 of file lift_arm_node.cpp.
| #define ROTATION2_RAD_GOAL_VEL 0.1 |
Definition at line 50 of file lift_arm_node.cpp.
| #define ROTATION2_VALID_START_RAD_LEFT_POS 0.0 |
Definition at line 18 of file lift_arm_node.cpp.
| #define ROTATION2_VALID_START_RAD_RIGHT_POS 0.0 |
Definition at line 25 of file lift_arm_node.cpp.
| #define SHOULDER1_JOINT_INDX 8 |
Definition at line 9 of file lift_arm_node.cpp.
| #define SHOULDER1_JOINT_NAME "shoulder1_joint" |
Definition at line 58 of file lift_arm_node.cpp.
| #define SHOULDER1_RAD_GOAL_LEFT_POS -1.5264 |
Definition at line 35 of file lift_arm_node.cpp.
| #define SHOULDER1_RAD_GOAL_RIGHT_POS -1.5264 |
Definition at line 44 of file lift_arm_node.cpp.
| #define SHOULDER1_RAD_GOAL_VEL 0.1 |
Definition at line 51 of file lift_arm_node.cpp.
| #define SHOULDER1_VALID_START_RAD_LEFT_POS -1.883 |
Definition at line 19 of file lift_arm_node.cpp.
| #define SHOULDER1_VALID_START_RAD_RIGHT_POS -1.883 |
Definition at line 26 of file lift_arm_node.cpp.
| #define SHOULDER2_JOINT_INDX 9 |
Definition at line 10 of file lift_arm_node.cpp.
| #define SHOULDER2_JOINT_NAME "shoulder2_joint" |
Definition at line 59 of file lift_arm_node.cpp.
| #define SHOULDER2_RAD_GOAL_LEFT_POS 2.1339 |
Definition at line 36 of file lift_arm_node.cpp.
| #define SHOULDER2_RAD_GOAL_RIGHT_POS 2.1339 |
Definition at line 45 of file lift_arm_node.cpp.
| #define SHOULDER2_RAD_GOAL_VEL 0.1 |
Definition at line 52 of file lift_arm_node.cpp.
| #define SHOULDER2_VALID_START_RAD_LEFT_POS 2.366 |
Definition at line 20 of file lift_arm_node.cpp.
| #define SHOULDER2_VALID_START_RAD_RIGHT_POS 2.366 |
Definition at line 27 of file lift_arm_node.cpp.
| #define SHOULDER3_JOINT_INDX 10 |
Definition at line 11 of file lift_arm_node.cpp.
| #define SHOULDER3_JOINT_NAME "shoulder3_joint" |
Definition at line 60 of file lift_arm_node.cpp.
| #define SHOULDER3_RAD_GOAL_LEFT_POS 0.0257 |
Definition at line 37 of file lift_arm_node.cpp.
| #define SHOULDER3_RAD_GOAL_RIGHT_POS 0.0257 |
Definition at line 46 of file lift_arm_node.cpp.
| #define SHOULDER3_RAD_GOAL_VEL 0.1 |
Definition at line 53 of file lift_arm_node.cpp.
| #define SHOULDER3_VALID_START_RAD_LEFT_POS 0.413287 |
Definition at line 21 of file lift_arm_node.cpp.
| #define SHOULDER3_VALID_START_RAD_RIGHT_POS 0.413287 |
Definition at line 28 of file lift_arm_node.cpp.
| #define VALID_START_RAD_GOAL_TOLERANCE 0.174533 |
Definition at line 15 of file lift_arm_node.cpp.
| #define WRIST_JOINT_INDX 12 |
Definition at line 12 of file lift_arm_node.cpp.
| #define WRIST_JOINT_NAME "wrist_joint" |
Definition at line 61 of file lift_arm_node.cpp.
| #define WRIST_RAD_GOAL_LEFT_POS 0.0 |
Definition at line 38 of file lift_arm_node.cpp.
| #define WRIST_RAD_GOAL_RIGHT_POS 0.0 |
Definition at line 47 of file lift_arm_node.cpp.
| #define WRIST_RAD_GOAL_VEL 0.1 |
Definition at line 54 of file lift_arm_node.cpp.
| #define WRIST_VALID_START_RAD_LEFT_POS 0.0 |
Definition at line 22 of file lift_arm_node.cpp.
| #define WRIST_VALID_START_RAD_RIGHT_POS 0.0 |
Definition at line 29 of file lift_arm_node.cpp.
Enumeration Type Documentation
| enum ArmPose |
| Enumerator | |
|---|---|
| INVALID | |
| GRIPPER_TO_THE_RIGHT | |
| GRIPPER_TO_THE_LEFT | |
Definition at line 63 of file lift_arm_node.cpp.
Function Documentation
| ArmPose getArmPose | ( | ) |
Definition at line 89 of file lift_arm_node.cpp.
| void jointsUpdateCB | ( | const sensor_msgs::JointState::ConstPtr & | msg | ) |
Definition at line 205 of file lift_arm_node.cpp.
| bool liftArmCB | ( | std_srvs::Trigger::Request & | req, |
| std_srvs::Trigger::Response & | res | ||
| ) |
Definition at line 141 of file lift_arm_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 232 of file lift_arm_node.cpp.
| bool openGripperCB | ( | std_srvs::Trigger::Request & | req, |
| std_srvs::Trigger::Response & | res | ||
| ) |
Definition at line 217 of file lift_arm_node.cpp.
Variable Documentation
| arm_state arm |
Definition at line 85 of file lift_arm_node.cpp.
| ros::Publisher arm_pub |
Definition at line 80 of file lift_arm_node.cpp.
| ros::Publisher gripper_pub |
Definition at line 81 of file lift_arm_node.cpp.
| ros::Subscriber joints_state_sub |
Definition at line 82 of file lift_arm_node.cpp.
| ros::ServiceServer lift_arm_srv |
Definition at line 83 of file lift_arm_node.cpp.
| ros::ServiceServer open_gripper_srv |
Definition at line 84 of file lift_arm_node.cpp.