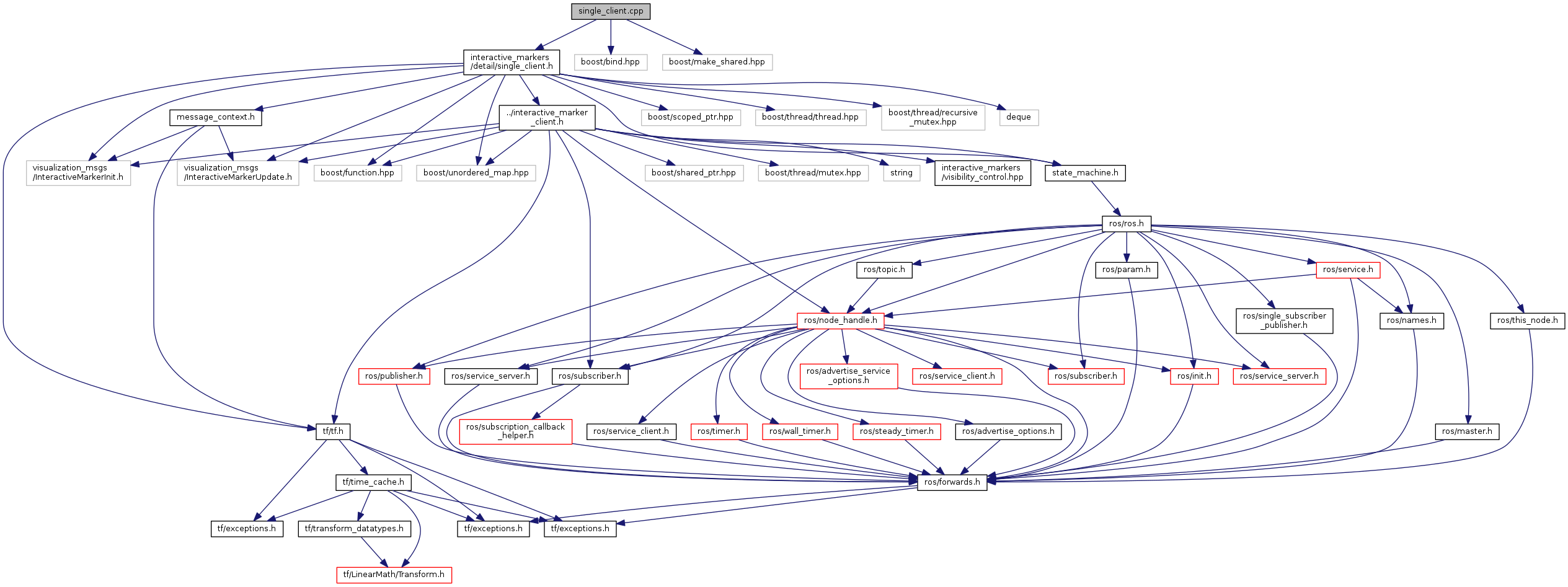
#include "interactive_markers/detail/single_client.h"#include <boost/bind.hpp>#include <boost/make_shared.hpp>
Include dependency graph for single_client.cpp:
Go to the source code of this file.
Namespaces | |
| interactive_markers | |
Macros | |
| #define | DBG_MSG(...) ROS_DEBUG( __VA_ARGS__ ); |
Macro Definition Documentation
| #define DBG_MSG | ( | ... | ) | ROS_DEBUG( __VA_ARGS__ ); |
Definition at line 37 of file single_client.cpp.