Public Member Functions | |
| bool | init (QuadrotorInterface *interface, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh) |
| MotorController () | |
| void | reset () |
| void | starting (const ros::Time &time) |
| void | stopping (const ros::Time &time) |
| void | update (const ros::Time &time, const ros::Duration &period) |
| void | wrenchCommandCallback (const geometry_msgs::WrenchStampedConstPtr &command) |
| ~MotorController () | |
 Public Member Functions inherited from controller_interface::Controller< QuadrotorInterface > Public Member Functions inherited from controller_interface::Controller< QuadrotorInterface > | |
| Controller () | |
| virtual bool | init (QuadrotorInterface *, ros::NodeHandle &) |
| virtual bool | init (QuadrotorInterface *, ros::NodeHandle &, ros::NodeHandle &) |
| virtual | ~Controller () |
| Public Member Functions inherited from controller_interface::ControllerBase | |
| ControllerBase () | |
| bool | isRunning () |
| bool | isRunning () |
| bool | startRequest (const ros::Time &time) |
| bool | startRequest (const ros::Time &time) |
| bool | stopRequest (const ros::Time &time) |
| bool | stopRequest (const ros::Time &time) |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| virtual | ~ControllerBase () |
Private Attributes | |
| std::string | base_link_frame_ |
| ros::ServiceServer | engage_service_server_ |
| hector_uav_msgs::MotorCommand | motor_ |
| MotorCommandHandlePtr | motor_output_ |
| ros::NodeHandle * | node_handle_ |
| struct { | |
| double force_per_voltage | |
| double lever | |
| double torque_per_voltage | |
| } | parameters_ |
| ros::ServiceServer | shutdown_service_server_ |
| geometry_msgs::WrenchStamped | wrench_ |
| WrenchCommandHandlePtr | wrench_input_ |
| ros::Subscriber | wrench_subscriber_ |
Additional Inherited Members | |
| Public Types inherited from controller_interface::ControllerBase | |
| typedef std::vector< hardware_interface::InterfaceResources > | ClaimedResources |
| Public Attributes inherited from controller_interface::ControllerBase | |
| CONSTRUCTED | |
| INITIALIZED | |
| RUNNING | |
| enum controller_interface::ControllerBase:: { ... } | state_ |
| Protected Member Functions inherited from controller_interface::Controller< QuadrotorInterface > | |
| std::string | getHardwareInterfaceType () const |
| virtual bool | initRequest (hardware_interface::RobotHW *robot_hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh, ClaimedResources &claimed_resources) |
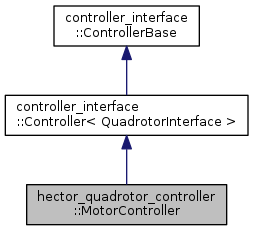
Detailed Description
Definition at line 42 of file motor_controller.cpp.
Constructor & Destructor Documentation
|
inline |
Definition at line 45 of file motor_controller.cpp.
|
inline |
Definition at line 49 of file motor_controller.cpp.
Member Function Documentation
|
inline |
Definition at line 58 of file motor_controller.cpp.
|
inline |
Definition at line 86 of file motor_controller.cpp.
|
inlinevirtual |
Reimplemented from controller_interface::ControllerBase.
Definition at line 110 of file motor_controller.cpp.
|
inlinevirtual |
Reimplemented from controller_interface::ControllerBase.
Definition at line 116 of file motor_controller.cpp.
|
inlinevirtual |
Implements controller_interface::ControllerBase.
Definition at line 121 of file motor_controller.cpp.
|
inline |
Definition at line 101 of file motor_controller.cpp.
Member Data Documentation
|
private |
Definition at line 174 of file motor_controller.cpp.
|
private |
Definition at line 169 of file motor_controller.cpp.
| double hector_quadrotor_controller::MotorController::force_per_voltage |
Definition at line 177 of file motor_controller.cpp.
| double hector_quadrotor_controller::MotorController::lever |
Definition at line 179 of file motor_controller.cpp.
|
private |
Definition at line 173 of file motor_controller.cpp.
|
private |
Definition at line 165 of file motor_controller.cpp.
|
private |
Definition at line 167 of file motor_controller.cpp.
| struct { ... } hector_quadrotor_controller::MotorController::parameters_ |
|
private |
Definition at line 170 of file motor_controller.cpp.
| double hector_quadrotor_controller::MotorController::torque_per_voltage |
Definition at line 178 of file motor_controller.cpp.
|
private |
Definition at line 172 of file motor_controller.cpp.
|
private |
Definition at line 164 of file motor_controller.cpp.
|
private |
Definition at line 168 of file motor_controller.cpp.
The documentation for this class was generated from the following file: