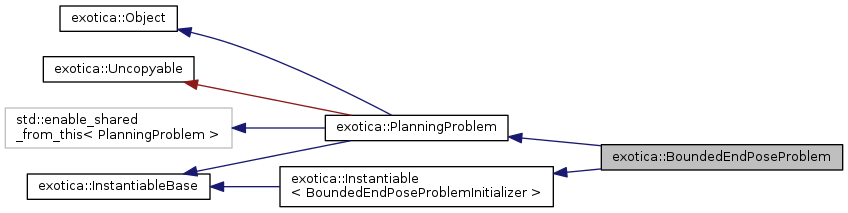
Bound constrained end-pose problem implementation. More...
#include <bounded_end_pose_problem.h>
Public Member Functions | |
| BoundedEndPoseProblem () | |
| Eigen::MatrixXd | GetBounds () const |
| Eigen::VectorXd | GetGoal (const std::string &task_name) |
| double | GetRho (const std::string &task_name) |
| double | GetScalarCost () const |
| Eigen::RowVectorXd | GetScalarJacobian () const |
| double | GetScalarTaskCost (const std::string &task_name) const |
| void | Instantiate (const BoundedEndPoseProblemInitializer &init) override |
| bool | IsValid () override |
| Evaluates whether the problem is valid. More... | |
| void | PreUpdate () override |
| void | SetGoal (const std::string &task_name, Eigen::VectorXdRefConst goal) |
| void | SetRho (const std::string &task_name, const double &rho) |
| void | Update (Eigen::VectorXdRefConst x) |
| virtual | ~BoundedEndPoseProblem () |
 Public Member Functions inherited from exotica::PlanningProblem Public Member Functions inherited from exotica::PlanningProblem | |
| virtual Eigen::VectorXd | ApplyStartState (bool update_traj=true) |
| int | get_num_controls () const |
| int | get_num_positions () const |
| ! Dimension of planning problem. TODO: Update from positions/velocities/controls and make private. More... | |
| int | get_num_velocities () const |
| std::pair< std::vector< double >, std::vector< double > > | GetCostEvolution () const |
| double | GetCostEvolution (int index) const |
| KinematicRequestFlags | GetFlags () const |
| int | GetNumberOfIterations () const |
| unsigned int | GetNumberOfProblemUpdates () const |
| ScenePtr | GetScene () const |
| Eigen::VectorXd | GetStartState () const |
| double | GetStartTime () const |
| TaskMapMap & | GetTaskMaps () |
| TaskMapVec & | GetTasks () |
| void | InstantiateBase (const Initializer &init) override |
| PlanningProblem () | |
| std::string | Print (const std::string &prepend) const override |
| void | ResetCostEvolution (size_t size) |
| void | ResetNumberOfProblemUpdates () |
| void | SetCostEvolution (int index, double value) |
| void | SetStartState (Eigen::VectorXdRefConst x) |
| void | SetStartTime (double t) |
| virtual | ~PlanningProblem () |
| Public Member Functions inherited from exotica::Object | |
| std::string | GetObjectName () |
| void | InstantiateObject (const Initializer &init) |
| Object () | |
| virtual std::string | type () const |
| Type Information wrapper: must be virtual so that it is polymorphic... More... | |
| virtual | ~Object () |
| Public Member Functions inherited from exotica::InstantiableBase | |
| InstantiableBase ()=default | |
| virtual | ~InstantiableBase ()=default |
| Public Member Functions inherited from exotica::Instantiable< BoundedEndPoseProblemInitializer > | |
| std::vector< Initializer > | GetAllTemplates () const override |
| Initializer | GetInitializerTemplate () override |
| const BoundedEndPoseProblemInitializer & | GetParameters () const |
| void | InstantiateInternal (const Initializer &init) override |
Public Attributes | |
| EndPoseTask | cost |
| Hessian | hessian |
| Eigen::MatrixXd | jacobian |
| int | length_jacobian |
| int | length_Phi |
| int | num_tasks |
| TaskSpaceVector | Phi |
| Eigen::MatrixXd | W |
| Public Attributes inherited from exotica::PlanningProblem | |
| int | N = 0 |
| double | t_start |
| TerminationCriterion | termination_criterion |
| Public Attributes inherited from exotica::Object | |
| bool | debug_ |
| std::string | ns_ |
| std::string | object_name_ |
Additional Inherited Members | |
| Protected Member Functions inherited from exotica::PlanningProblem | |
| void | UpdateMultipleTaskKinematics (std::vector< std::shared_ptr< KinematicResponse >> responses) |
| void | UpdateTaskKinematics (std::shared_ptr< KinematicResponse > response) |
| Protected Attributes inherited from exotica::PlanningProblem | |
| std::vector< std::pair< std::chrono::high_resolution_clock::time_point, double > > | cost_evolution_ |
| KinematicRequestFlags | flags_ = KinematicRequestFlags::KIN_FK |
| unsigned int | number_of_problem_updates_ = 0 |
| ScenePtr | scene_ |
| Eigen::VectorXd | start_state_ |
| TaskMapMap | task_maps_ |
| TaskMapVec | tasks_ |
| Protected Attributes inherited from exotica::Instantiable< BoundedEndPoseProblemInitializer > | |
| BoundedEndPoseProblemInitializer | parameters_ |
Detailed Description
Bound constrained end-pose problem implementation.
Definition at line 41 of file bounded_end_pose_problem.h.
Constructor & Destructor Documentation
| exotica::BoundedEndPoseProblem::BoundedEndPoseProblem | ( | ) |
Definition at line 39 of file bounded_end_pose_problem.cpp.
|
virtualdefault |
Member Function Documentation
| Eigen::MatrixXd exotica::BoundedEndPoseProblem::GetBounds | ( | ) | const |
Definition at line 46 of file bounded_end_pose_problem.cpp.
| Eigen::VectorXd exotica::BoundedEndPoseProblem::GetGoal | ( | const std::string & | task_name | ) |
Definition at line 204 of file bounded_end_pose_problem.cpp.
| double exotica::BoundedEndPoseProblem::GetRho | ( | const std::string & | task_name | ) |
Definition at line 216 of file bounded_end_pose_problem.cpp.
| double exotica::BoundedEndPoseProblem::GetScalarCost | ( | ) | const |
Definition at line 108 of file bounded_end_pose_problem.cpp.
| Eigen::RowVectorXd exotica::BoundedEndPoseProblem::GetScalarJacobian | ( | ) | const |
Definition at line 113 of file bounded_end_pose_problem.cpp.
| double exotica::BoundedEndPoseProblem::GetScalarTaskCost | ( | const std::string & | task_name | ) | const |
Definition at line 118 of file bounded_end_pose_problem.cpp.
|
overridevirtual |
Reimplemented from exotica::Instantiable< BoundedEndPoseProblemInitializer >.
Definition at line 51 of file bounded_end_pose_problem.cpp.
|
overridevirtual |
Evaluates whether the problem is valid.
Reimplemented from exotica::PlanningProblem.
Definition at line 228 of file bounded_end_pose_problem.cpp.
|
overridevirtual |
Reimplemented from exotica::PlanningProblem.
Definition at line 101 of file bounded_end_pose_problem.cpp.
| void exotica::BoundedEndPoseProblem::SetGoal | ( | const std::string & | task_name, |
| Eigen::VectorXdRefConst | goal | ||
| ) |
Definition at line 176 of file bounded_end_pose_problem.cpp.
| void exotica::BoundedEndPoseProblem::SetRho | ( | const std::string & | task_name, |
| const double & | rho | ||
| ) |
Definition at line 190 of file bounded_end_pose_problem.cpp.
| void exotica::BoundedEndPoseProblem::Update | ( | Eigen::VectorXdRefConst | x | ) |
Definition at line 130 of file bounded_end_pose_problem.cpp.
Member Data Documentation
| EndPoseTask exotica::BoundedEndPoseProblem::cost |
Definition at line 63 of file bounded_end_pose_problem.h.
| Hessian exotica::BoundedEndPoseProblem::hessian |
Definition at line 67 of file bounded_end_pose_problem.h.
| Eigen::MatrixXd exotica::BoundedEndPoseProblem::jacobian |
Definition at line 68 of file bounded_end_pose_problem.h.
| int exotica::BoundedEndPoseProblem::length_jacobian |
Definition at line 71 of file bounded_end_pose_problem.h.
| int exotica::BoundedEndPoseProblem::length_Phi |
Definition at line 70 of file bounded_end_pose_problem.h.
| int exotica::BoundedEndPoseProblem::num_tasks |
Definition at line 72 of file bounded_end_pose_problem.h.
| TaskSpaceVector exotica::BoundedEndPoseProblem::Phi |
Definition at line 66 of file bounded_end_pose_problem.h.
| Eigen::MatrixXd exotica::BoundedEndPoseProblem::W |
Definition at line 65 of file bounded_end_pose_problem.h.
The documentation for this class was generated from the following files: