Public Member Functions | |
| def | __init__ (self, dxl_io, controller_namespace, port_namespace) |
| def | initialize (self) |
| def | pos_rad_to_raw (self, pos_rad) |
| def | process_command (self, msg) |
| def | process_motor_states (self, state_list) |
| def | set_acceleration_raw (self, acc) |
| def | set_compliance_margin (self, margin) |
| def | set_compliance_punch (self, punch) |
| def | set_compliance_slope (self, slope) |
| def | set_speed (self, speed) |
| def | set_torque_enable (self, torque_enable) |
| def | set_torque_limit (self, max_torque) |
| def | spd_rad_to_raw (self, spd_rad) |
 Public Member Functions inherited from dynamixel_controllers.joint_controller.JointController Public Member Functions inherited from dynamixel_controllers.joint_controller.JointController | |
| def | __init__ (self, dxl_io, controller_namespace, port_namespace) |
| def | initialize (self) |
| def | process_command (self, msg) |
| def | process_motor_states (self, state_list) |
| def | process_set_compliance_margin (self, req) |
| def | process_set_compliance_punch (self, req) |
| def | process_set_compliance_slope (self, req) |
| def | process_set_speed (self, req) |
| def | process_set_torque_limit (self, req) |
| def | process_torque_enable (self, req) |
| def | rad_to_raw (self, angle, initial_position_raw, flipped, encoder_ticks_per_radian) |
| def | raw_to_rad (self, raw, initial_position_raw, flipped, radians_per_encoder_tick) |
| def | set_compliance_margin (self, margin) |
| def | set_compliance_punch (self, punch) |
| def | set_compliance_slope (self, slope) |
| def | set_speed (self, speed) |
| def | set_torque_enable (self, torque_enable) |
| def | set_torque_limit (self, max_torque) |
| def | start (self) |
| def | stop (self) |
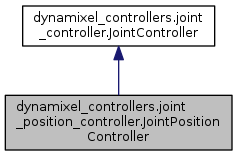
Detailed Description
Definition at line 54 of file joint_position_controller.py.
Constructor & Destructor Documentation
| def dynamixel_controllers.joint_position_controller.JointPositionController.__init__ | ( | self, | |
| dxl_io, | |||
| controller_namespace, | |||
| port_namespace | |||
| ) |
Definition at line 55 of file joint_position_controller.py.
Member Function Documentation
| def dynamixel_controllers.joint_position_controller.JointPositionController.initialize | ( | self | ) |
Definition at line 71 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.pos_rad_to_raw | ( | self, | |
| pos_rad | |||
| ) |
Definition at line 116 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.process_command | ( | self, | |
| msg | |||
| ) |
Definition at line 183 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.process_motor_states | ( | self, | |
| state_list | |||
| ) |
Definition at line 167 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.set_acceleration_raw | ( | self, | |
| acc | |||
| ) |
Definition at line 162 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.set_compliance_margin | ( | self, | |
| margin | |||
| ) |
Definition at line 141 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.set_compliance_punch | ( | self, | |
| punch | |||
| ) |
Definition at line 148 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.set_compliance_slope | ( | self, | |
| slope | |||
| ) |
Definition at line 135 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.set_speed | ( | self, | |
| speed | |||
| ) |
Definition at line 131 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.set_torque_enable | ( | self, | |
| torque_enable | |||
| ) |
Definition at line 127 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.set_torque_limit | ( | self, | |
| max_torque | |||
| ) |
Definition at line 155 of file joint_position_controller.py.
| def dynamixel_controllers.joint_position_controller.JointPositionController.spd_rad_to_raw | ( | self, | |
| spd_rad | |||
| ) |
Definition at line 121 of file joint_position_controller.py.
Member Data Documentation
| dynamixel_controllers.joint_position_controller.JointPositionController.acceleration |
Definition at line 63 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.ENCODER_RESOLUTION |
Definition at line 90 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.ENCODER_TICKS_PER_RADIAN |
Definition at line 81 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.flipped |
Definition at line 67 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.initial_position_raw |
Definition at line 59 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.joint_max_speed |
Definition at line 104 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.joint_speed |
Definition at line 109 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.joint_state |
Definition at line 69 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.max_angle |
Definition at line 85 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.max_angle_raw |
Definition at line 61 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.MAX_POSITION |
Definition at line 91 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.MAX_VELOCITY |
Definition at line 93 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.min_angle |
Definition at line 84 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.min_angle_raw |
Definition at line 60 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.MIN_VELOCITY |
Definition at line 94 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.motor_id |
Definition at line 58 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.RADIANS_PER_ENCODER_TICK |
Definition at line 80 of file joint_position_controller.py.
| dynamixel_controllers.joint_position_controller.JointPositionController.VELOCITY_PER_TICK |
Definition at line 92 of file joint_position_controller.py.
The documentation for this class was generated from the following file: