#include <gtest/gtest.h>#include <ros/ros.h>#include <std_msgs/Bool.h>#include <geometry_msgs/TwistStamped.h>#include <dataspeed_ulc_msgs/UlcCmd.h>#include <dataspeed_ulc_msgs/UlcReport.h>#include <dataspeed_ulc_can/dispatch.h>#include <can_msgs/Frame.h>#include "MsgRx.h"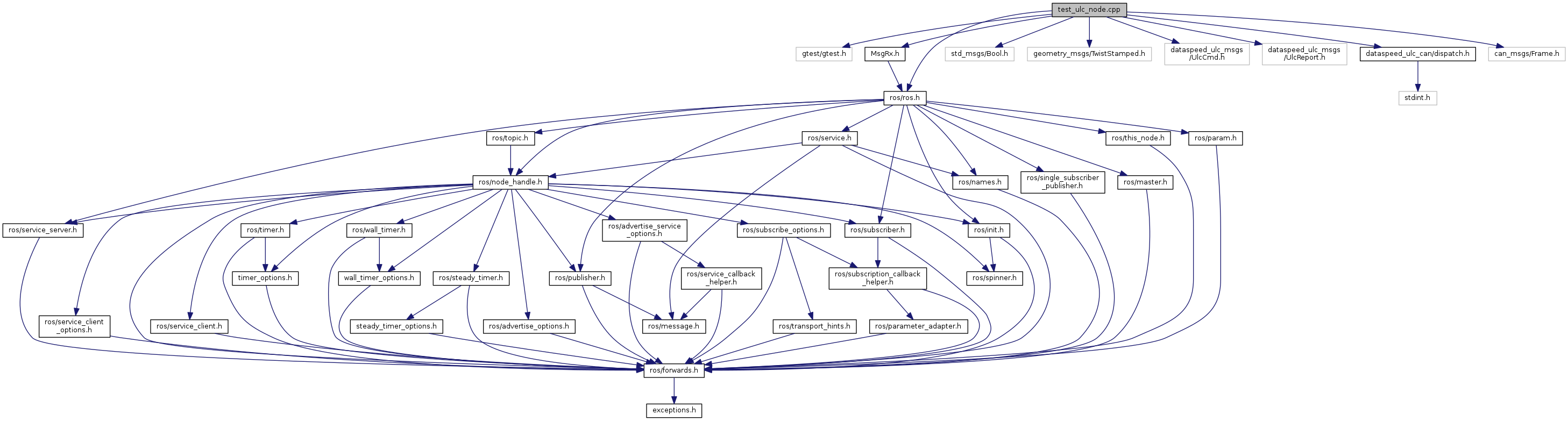
Go to the source code of this file.
Functions | |
| static void | checkImmediateCfg () |
| int | main (int argc, char **argv) |
| void | recvCan (const can_msgs::FrameConstPtr &msg) |
| void | recvReport (const dataspeed_ulc_msgs::UlcReportConstPtr &msg) |
| TEST (ULCNode, topics) | |
| TEST (ULCNode, cfgTiming) | |
| TEST (ULCNode, cmdRangeSaturation) | |
| TEST (ULCNode, outOfBoundsInputs) | |
| TEST (ULCNode, scaleFactors) | |
| TEST (ULCNode, dbwEnable) | |
| TEST (ULCNode, twistInputs) | |
| TEST (ULCNode, reportParsing) | |
| template<class T > | |
| static bool | waitForMsg (ros::WallDuration dur, const MsgRx< T > &msg_rx) |
| static bool | waitForTopics (ros::WallDuration dur) |
Function Documentation
|
static |
Definition at line 101 of file test_ulc_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 505 of file test_ulc_node.cpp.
| void recvCan | ( | const can_msgs::FrameConstPtr & | msg | ) |
Definition at line 48 of file test_ulc_node.cpp.
| void recvReport | ( | const dataspeed_ulc_msgs::UlcReportConstPtr & | msg | ) |
Definition at line 62 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| topics | |||
| ) |
Definition at line 110 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| cfgTiming | |||
| ) |
Definition at line 120 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| cmdRangeSaturation | |||
| ) |
Definition at line 159 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| outOfBoundsInputs | |||
| ) |
Definition at line 300 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| scaleFactors | |||
| ) |
Definition at line 357 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| dbwEnable | |||
| ) |
Definition at line 390 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| twistInputs | |||
| ) |
Definition at line 436 of file test_ulc_node.cpp.
| TEST | ( | ULCNode | , |
| reportParsing | |||
| ) |
Definition at line 464 of file test_ulc_node.cpp.
|
static |
Definition at line 68 of file test_ulc_node.cpp.
|
static |
Definition at line 82 of file test_ulc_node.cpp.
Variable Documentation
| const double ACCEL_REPORT_SCALE_FACTOR = 0.05 |
Definition at line 36 of file test_ulc_node.cpp.
| const double ANGULAR_ACCEL_SCALE_FACTOR = 0.02 |
Definition at line 32 of file test_ulc_node.cpp.
| const double CURVATURE_SCALE_FACTOR = 0.0000061 |
Definition at line 26 of file test_ulc_node.cpp.
| double g_cfg_freq |
Definition at line 21 of file test_ulc_node.cpp.
| MsgRx<MsgUlcCfg> g_msg_ulc_cfg(ros::WallDuration(0.05)) |
| MsgRx<MsgUlcCmd> g_msg_ulc_cmd(ros::WallDuration(0.05)) |
| MsgRx<dataspeed_ulc_msgs::UlcReport> g_msg_ulc_report(ros::WallDuration(0.05)) |
| ros::Publisher g_pub_can |
Definition at line 44 of file test_ulc_node.cpp.
| ros::Publisher g_pub_enable |
Definition at line 41 of file test_ulc_node.cpp.
| ros::Publisher g_pub_twist |
Definition at line 42 of file test_ulc_node.cpp.
| ros::Publisher g_pub_twist_stamped |
Definition at line 43 of file test_ulc_node.cpp.
| ros::Publisher g_pub_ulc_cmd |
Definition at line 40 of file test_ulc_node.cpp.
| ros::Subscriber g_sub_can |
Definition at line 45 of file test_ulc_node.cpp.
| ros::Subscriber g_sub_report |
Definition at line 46 of file test_ulc_node.cpp.
| dataspeed_ulc_msgs::UlcCmd g_ulc_cmd |
Definition at line 20 of file test_ulc_node.cpp.
| const double LATERAL_ACCEL_SCALE_FACTOR = 0.05 |
Definition at line 31 of file test_ulc_node.cpp.
| const double LIN_VEL_SCALE_FACTOR = 0.0025 |
Definition at line 24 of file test_ulc_node.cpp.
| const double LINEAR_ACCEL_SCALE_FACTOR = 0.025 |
Definition at line 29 of file test_ulc_node.cpp.
| const double LINEAR_DECEL_SCALE_FACTOR = 0.025 |
Definition at line 30 of file test_ulc_node.cpp.
| const double MAX_ANGLE_SCALE_FACTOR = 5.0 |
Definition at line 37 of file test_ulc_node.cpp.
| const double MAX_RATE_SCALE_FACTOR = 8.0 |
Definition at line 38 of file test_ulc_node.cpp.
Definition at line 14 of file test_ulc_node.cpp.
| ros::NodeHandle * pn |
Definition at line 14 of file test_ulc_node.cpp.
| const double SPEED_REPORT_SCALE_FACTOR = 0.02 |
Definition at line 35 of file test_ulc_node.cpp.
| const double YAW_RATE_SCALE_FACTOR = 0.00025 |
Definition at line 25 of file test_ulc_node.cpp.