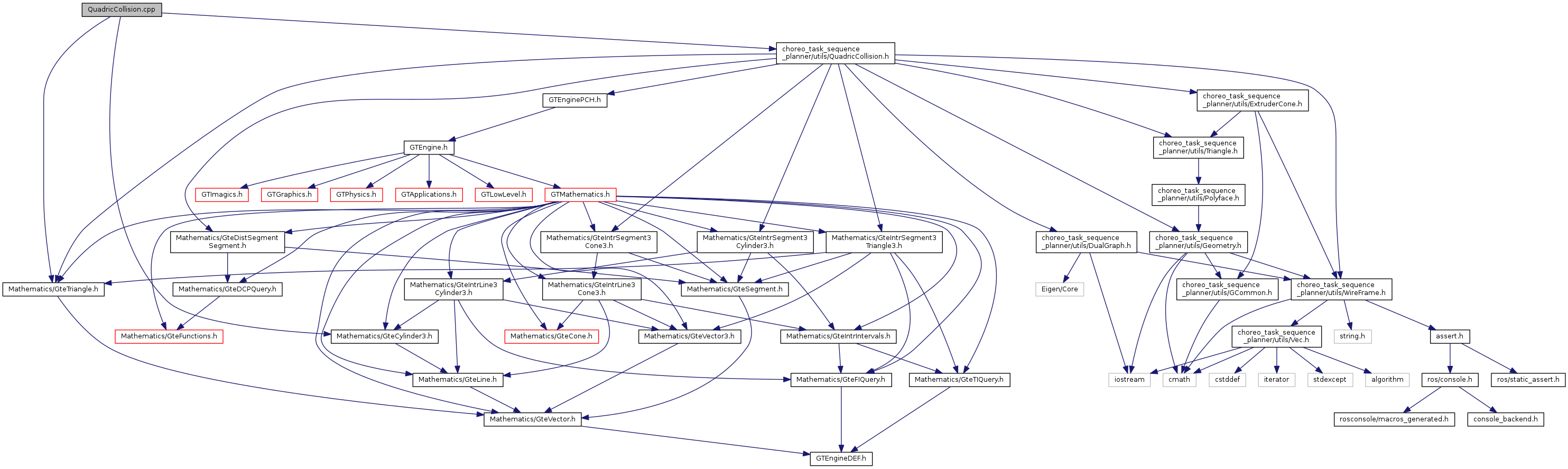
#include <Mathematics/GteTriangle.h>#include <Mathematics/GteCylinder3.h>#include "choreo_task_sequence_planner/utils/QuadricCollision.h"
Include dependency graph for QuadricCollision.cpp:
Go to the source code of this file.
Variables | |
| static const double | MAX_COLLISION_CHECK_DIST = 200 |
Variable Documentation
|
static |
Definition at line 5 of file QuadricCollision.cpp.