#include "pose_prediction_ism/pose_predictor.h"#include "ISM/utility/GeometryHelper.hpp"#include "Eigen/Geometry"
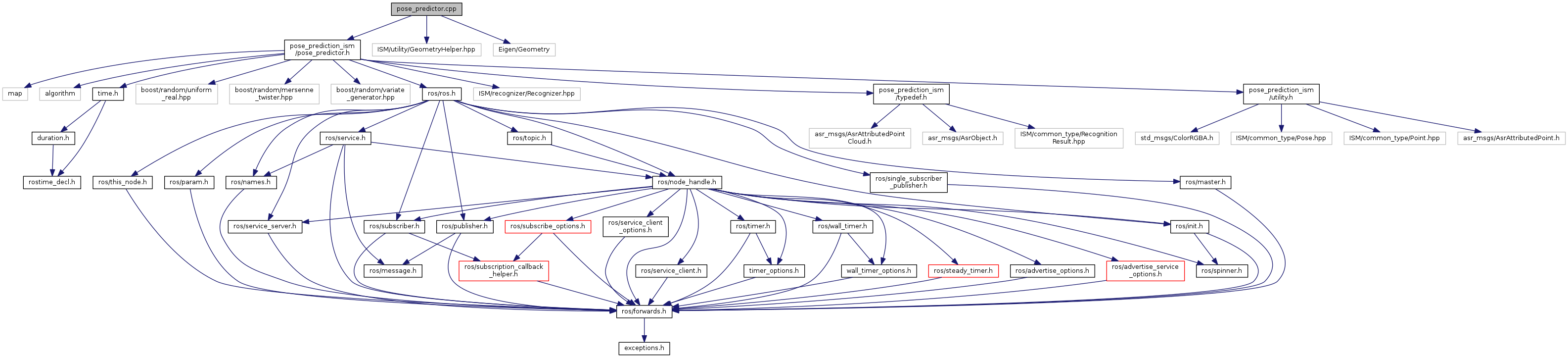
Include dependency graph for pose_predictor.cpp:
Go to the source code of this file.
Namespaces | |
| pose_prediction_ism | |
Functions | |
| std::ostream & | pose_prediction_ism::operator<< (std::ostream &strm, const PosePredictor &p) |
| std::ostream & | pose_prediction_ism::operator<< (std::ostream &strm, const PosePredictorPtr &pPtr) |