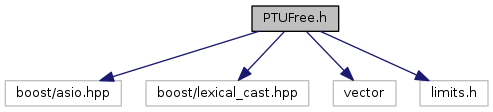
#include <boost/asio.hpp>#include <boost/lexical_cast.hpp>#include <vector>#include "limits.h"
Include dependency graph for PTUFree.h:
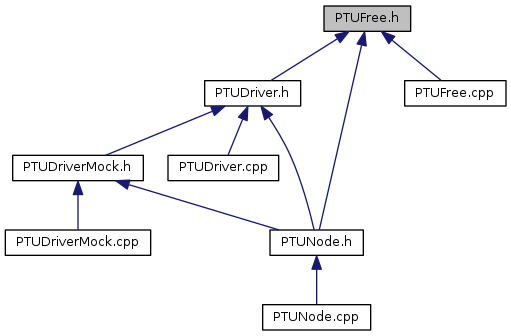
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ptu_free::PTUFree |
Namespaces | |
| ptu_free | |
Macros | |
| #define | BOTH_RESET_MODE ( LONG_MIN + 17 ) |
| #define | DISABLED ( LONG_MIN + 1 ) |
| #define | ENABELED ( LONG_MIN + 2 ) |
| #define | ERROR LONG_MIN |
| #define | ERROR_CODES_BELOW ( LONG_MIN + 24) |
| #define | FACTORY_LIMITS_ENABLED ( LONG_MIN + 3 ) |
| #define | HALT_BOTH ( LONG_MIN + 11 ) |
| #define | HALT_PAN_ONLY ( LONG_MIN + 9 ) |
| #define | HALT_TILT_ONLY ( LONG_MIN + 10 ) |
| #define | HIGH_MOVE_POWER_MODE ( LONG_MIN + 21 ) |
| #define | IMMEDIATE_POSITION_EXECUTION_MODE ( LONG_MIN + 7 ) |
| #define | INDEPENDENT_SPEED_MODE ( LONG_MIN + 12 ) |
| #define | LIMITS_DISABLED ( LONG_MIN + 5 ) |
| #define | LOW_HOLD_POWER_MODE ( LONG_MIN + 19 ) |
| #define | LOW_MOVE_POWER_MODE ( LONG_MIN + 23 ) |
| #define | NO_RESET_MODE ( LONG_MIN + 14 ) |
| #define | OFF_HOLD_POWER_MODE ( LONG_MIN + 20 ) |
| #define | PAN_ONLY_RESET_MODE ( LONG_MIN + 15 ) |
| #define | PURE_VELOCITY_CONTROL_MODE ( LONG_MIN + 13 ) |
| #define | REGULAR_HOLD_POWER_MODE ( LONG_MIN + 18 ) |
| #define | REGULAR_MOVE_POWER_MODE ( LONG_MIN + 22 ) |
| #define | SLAVED_POSITION_EXECUTION_MODE ( LONG_MIN + 8 ) |
| #define | TILT_ONLY_RESET_MODE ( LONG_MIN + 16 ) |
| #define | USER_DEFINED_LIMITS_ENABLED ( LONG_MIN + 4 ) |
| #define | USER_DEFINED_PAN_LIMIT_ENABLED ( LONG_MIN + 6 ) |