#include <pcl_conversions/pcl_conversions.h>#include <pcl/point_types.h>#include <pcl/registration/icp.h>#include <pcl/registration/registration.h>#include <geometry_msgs/PoseStamped.h>#include <ros/ros.h>#include <pcl/ModelCoefficients.h>#include <pcl/sample_consensus/method_types.h>#include <pcl/sample_consensus/model_types.h>#include <pcl/segmentation/sac_segmentation.h>#include <pcl_ros/point_cloud.h>#include <pcl/filters/extract_indices.h>#include <boost/lexical_cast.hpp>#include <Eigen/StdVector>#include <opencv2/core/core.hpp>#include <tf/LinearMath/Matrix3x3.h>
Include dependency graph for kinect_filtering.h:

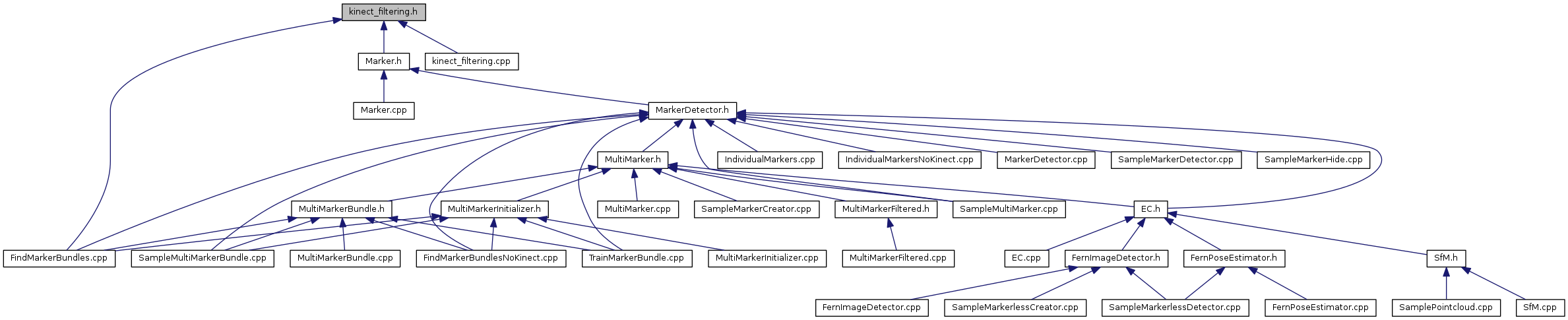
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | ar_track_alvar::PlaneFitResult |
Namespaces | |
| ar_track_alvar | |
Typedefs | |
| typedef pcl::PointCloud< ARPoint > | ar_track_alvar::ARCloud |
| typedef pcl::PointXYZRGB | ar_track_alvar::ARPoint |
Functions | |
| geometry_msgs::Point | ar_track_alvar::centroid (const ARCloud &points) |
| int | ar_track_alvar::extractFrame (const pcl::ModelCoefficients &coeffs, const ARPoint &p1, const ARPoint &p2, const ARPoint &p3, const ARPoint &p4, tf::Matrix3x3 &retmat) |
| int | ar_track_alvar::extractOrientation (const pcl::ModelCoefficients &coeffs, const ARPoint &p1, const ARPoint &p2, const ARPoint &p3, const ARPoint &p4, geometry_msgs::Quaternion &retQ) |
| ARCloud::Ptr | ar_track_alvar::filterCloud (const ARCloud &cloud, const std::vector< cv::Point, Eigen::aligned_allocator< cv::Point > > &pixels) |
| PlaneFitResult | ar_track_alvar::fitPlane (ARCloud::ConstPtr cloud) |
Detailed Description
Library for depth based filtering
Definition in file kinect_filtering.h.