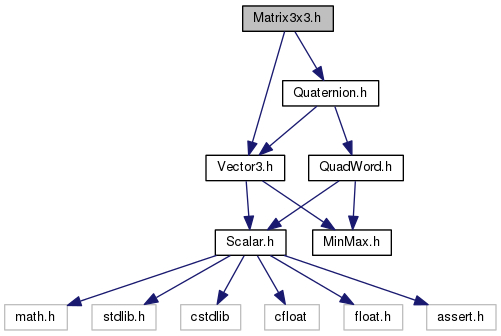
Include dependency graph for Matrix3x3.h:
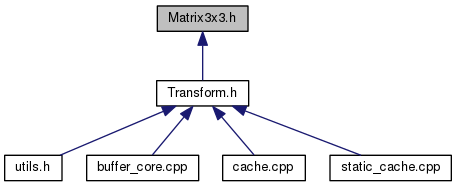
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | tf2::Matrix3x3 |
| The Matrix3x3 class implements a 3x3 rotation matrix, to perform linear algebra in combination with Quaternion, Transform and Vector3. Make sure to only include a pure orthogonal matrix without scaling. More... | |
| struct | tf2::Matrix3x3DoubleData |
| for serialization More... | |
| struct | tf2::Matrix3x3FloatData |
| for serialization More... | |
Namespaces | |
| namespace | tf2 |
Defines | |
| #define | Matrix3x3Data Matrix3x3DoubleData |
Functions | |
| TF2SIMD_FORCE_INLINE Vector3 | tf2::operator* (const Matrix3x3 &m, const Vector3 &v) |
| TF2SIMD_FORCE_INLINE Vector3 | tf2::operator* (const Vector3 &v, const Matrix3x3 &m) |
| TF2SIMD_FORCE_INLINE Matrix3x3 | tf2::operator* (const Matrix3x3 &m1, const Matrix3x3 &m2) |
| TF2SIMD_FORCE_INLINE bool | tf2::operator== (const Matrix3x3 &m1, const Matrix3x3 &m2) |
| Equality operator between two matrices It will test all elements are equal. | |
Define Documentation
| #define Matrix3x3Data Matrix3x3DoubleData |
Definition at line 26 of file Matrix3x3.h.