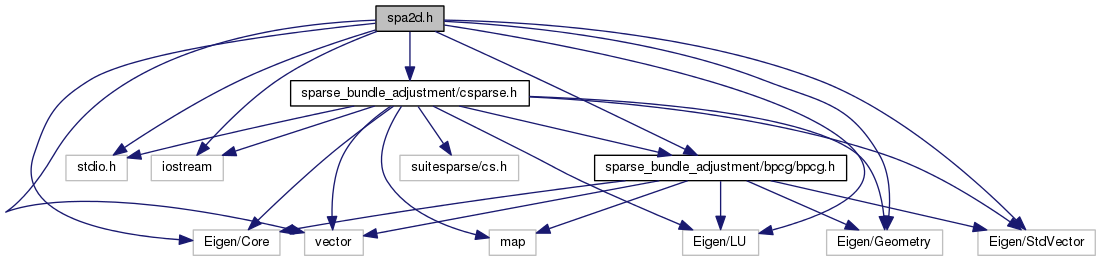
#include <stdio.h>#include <iostream>#include <Eigen/Core>#include <Eigen/Geometry>#include <Eigen/LU>#include <Eigen/StdVector>#include <vector>#include <sparse_bundle_adjustment/csparse.h>#include <sparse_bundle_adjustment/bpcg/bpcg.h>
Include dependency graph for spa2d.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | sba::Con2dP2 |
| class | sba::Node2d |
| class | sba::SysSPA2d |
| SysSPA2d holds a set of nodes and constraints for sparse pose adjustment. More... | |
Namespaces | |
| namespace | sba |
Defines | |
| #define | EIGEN_USE_NEW_STDVECTOR |
| #define | SBA_BLOCK_JACOBIAN_PCG 3 |
| #define | SBA_DENSE_CHOLESKY 0 |
| #define | SBA_GRADIENT 2 |
| #define | SBA_SPARSE_CHOLESKY 1 |
Functions | |
| bool | sba::read2dP2File (char *fname, SysSPA2d spa) |
| constraint files | |
Define Documentation
| #define EIGEN_USE_NEW_STDVECTOR |
| #define SBA_BLOCK_JACOBIAN_PCG 3 |
| #define SBA_DENSE_CHOLESKY 0 |
| #define SBA_GRADIENT 2 |
| #define SBA_SPARSE_CHOLESKY 1 |