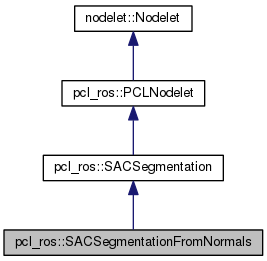
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation. More...
#include <sac_segmentation.h>
Public Member Functions | |
| std::string | getInputTFframe () |
| Get the TF frame the input PointCloud should be transformed into before processing. | |
| std::string | getOutputTFframe () |
| Get the TF frame the PointCloud should be transformed into after processing. | |
| void | setInputTFframe (std::string tf_frame) |
| Set the input TF frame the data should be transformed into before processing, if input.header.frame_id is different. | |
| void | setOutputTFframe (std::string tf_frame) |
| Set the output TF frame the data should be transformed into after processing. | |
Protected Member Functions | |
| void | axis_callback (const pcl_msgs::ModelCoefficientsConstPtr &model) |
| Model callback. | |
| void | config_callback (SACSegmentationFromNormalsConfig &config, uint32_t level) |
| Dynamic reconfigure callback. | |
| void | input_callback (const PointCloudConstPtr &cloud) |
| Input point cloud callback. Because we want to use the same synchronizer object, we push back empty elements with the same timestamp. | |
| void | input_normals_indices_callback (const PointCloudConstPtr &cloud, const PointCloudNConstPtr &cloud_normals, const PointIndicesConstPtr &indices) |
| Input point cloud callback. | |
| virtual void | onInit () |
| Nodelet initialization routine. | |
Protected Attributes | |
| message_filters::PassThrough < PointIndices > | nf_ |
| Null passthrough filter, used for pushing empty elements in the synchronizer. | |
| boost::shared_ptr < dynamic_reconfigure::Server < SACSegmentationFromNormalsConfig > > | srv_ |
| Pointer to a dynamic reconfigure service. | |
| ros::Subscriber | sub_axis_ |
| The input PointCloud subscriber. | |
| message_filters::Subscriber < PointCloudN > | sub_normals_filter_ |
| The normals PointCloud subscriber filter. | |
| std::string | tf_input_frame_ |
| The input TF frame the data should be transformed into, if input.header.frame_id is different. | |
| std::string | tf_input_orig_frame_ |
| The original data input TF frame. | |
| std::string | tf_output_frame_ |
| The output TF frame the data should be transformed into, if input.header.frame_id is different. | |
Private Types | |
| typedef pcl::PointCloud < pcl::PointXYZ > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef pcl::PointCloud < pcl::Normal > | PointCloudN |
| typedef PointCloudN::ConstPtr | PointCloudNConstPtr |
| typedef PointCloudN::Ptr | PointCloudNPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Private Attributes | |
| pcl::SACSegmentationFromNormals < pcl::PointXYZ, pcl::Normal > | impl_ |
| The PCL implementation used. | |
| boost::mutex | mutex_ |
| Internal mutex. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ApproximateTime < PointCloud, PointCloudN, PointIndices > > > | sync_input_normals_indices_a_ |
| Synchronized input, normals, and indices. | |
| boost::shared_ptr < message_filters::Synchronizer < sync_policies::ExactTime < PointCloud, PointCloudN, PointIndices > > > | sync_input_normals_indices_e_ |
Detailed Description
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation.
Definition at line 177 of file sac_segmentation.h.
Member Typedef Documentation
typedef pcl::PointCloud<pcl::PointXYZ> pcl_ros::SACSegmentationFromNormals::PointCloud [private] |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 179 of file sac_segmentation.h.
typedef PointCloud::ConstPtr pcl_ros::SACSegmentationFromNormals::PointCloudConstPtr [private] |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 181 of file sac_segmentation.h.
typedef pcl::PointCloud<pcl::Normal> pcl_ros::SACSegmentationFromNormals::PointCloudN [private] |
Definition at line 183 of file sac_segmentation.h.
typedef PointCloudN::ConstPtr pcl_ros::SACSegmentationFromNormals::PointCloudNConstPtr [private] |
Definition at line 185 of file sac_segmentation.h.
typedef PointCloudN::Ptr pcl_ros::SACSegmentationFromNormals::PointCloudNPtr [private] |
Definition at line 184 of file sac_segmentation.h.
typedef PointCloud::Ptr pcl_ros::SACSegmentationFromNormals::PointCloudPtr [private] |
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 180 of file sac_segmentation.h.
Member Function Documentation
| void pcl_ros::SACSegmentationFromNormals::axis_callback | ( | const pcl_msgs::ModelCoefficientsConstPtr & | model | ) | [protected] |
Model callback.
- Parameters:
-
model the sample consensus model found
Definition at line 467 of file sac_segmentation.cpp.
| void pcl_ros::SACSegmentationFromNormals::config_callback | ( | SACSegmentationFromNormalsConfig & | config, |
| uint32_t | level | ||
| ) | [protected] |
Dynamic reconfigure callback.
- Parameters:
-
config the config object level the dynamic reconfigure level
Definition at line 484 of file sac_segmentation.cpp.
| std::string pcl_ros::SACSegmentationFromNormals::getInputTFframe | ( | ) | [inline] |
Get the TF frame the input PointCloud should be transformed into before processing.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 194 of file sac_segmentation.h.
| std::string pcl_ros::SACSegmentationFromNormals::getOutputTFframe | ( | ) | [inline] |
Get the TF frame the PointCloud should be transformed into after processing.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 202 of file sac_segmentation.h.
| void pcl_ros::SACSegmentationFromNormals::input_callback | ( | const PointCloudConstPtr & | cloud | ) | [inline, protected] |
Input point cloud callback. Because we want to use the same synchronizer object, we push back empty elements with the same timestamp.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 220 of file sac_segmentation.h.
| void pcl_ros::SACSegmentationFromNormals::input_normals_indices_callback | ( | const PointCloudConstPtr & | cloud, |
| const PointCloudNConstPtr & | cloud_normals, | ||
| const PointIndicesConstPtr & | indices | ||
| ) | [protected] |
Input point cloud callback.
- Parameters:
-
cloud the pointer to the input point cloud cloud_normals the pointer to the input point cloud normals indices the pointer to the input point cloud indices
DEBUG
Definition at line 550 of file sac_segmentation.cpp.
| void pcl_ros::SACSegmentationFromNormals::onInit | ( | ) | [protected, virtual] |
Nodelet initialization routine.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 347 of file sac_segmentation.cpp.
| void pcl_ros::SACSegmentationFromNormals::setInputTFframe | ( | std::string | tf_frame | ) | [inline] |
Set the input TF frame the data should be transformed into before processing, if input.header.frame_id is different.
- Parameters:
-
tf_frame the TF frame the input PointCloud should be transformed into before processing
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 191 of file sac_segmentation.h.
| void pcl_ros::SACSegmentationFromNormals::setOutputTFframe | ( | std::string | tf_frame | ) | [inline] |
Set the output TF frame the data should be transformed into after processing.
- Parameters:
-
tf_frame the TF frame the PointCloud should be transformed into after processing
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 199 of file sac_segmentation.h.
Member Data Documentation
pcl::SACSegmentationFromNormals<pcl::PointXYZ, pcl::Normal> pcl_ros::SACSegmentationFromNormals::impl_ [private] |
The PCL implementation used.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 266 of file sac_segmentation.h.
boost::mutex pcl_ros::SACSegmentationFromNormals::mutex_ [private] |
Internal mutex.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 263 of file sac_segmentation.h.
Null passthrough filter, used for pushing empty elements in the synchronizer.
Definition at line 229 of file sac_segmentation.h.
boost::shared_ptr<dynamic_reconfigure::Server<SACSegmentationFromNormalsConfig> > pcl_ros::SACSegmentationFromNormals::srv_ [protected] |
Pointer to a dynamic reconfigure service.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 213 of file sac_segmentation.h.
The input PointCloud subscriber.
Definition at line 210 of file sac_segmentation.h.
message_filters::Subscriber<PointCloudN> pcl_ros::SACSegmentationFromNormals::sub_normals_filter_ [protected] |
The normals PointCloud subscriber filter.
Definition at line 207 of file sac_segmentation.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ApproximateTime<PointCloud, PointCloudN, PointIndices> > > pcl_ros::SACSegmentationFromNormals::sync_input_normals_indices_a_ [private] |
Synchronized input, normals, and indices.
Definition at line 269 of file sac_segmentation.h.
boost::shared_ptr<message_filters::Synchronizer<sync_policies::ExactTime<PointCloud, PointCloudN, PointIndices> > > pcl_ros::SACSegmentationFromNormals::sync_input_normals_indices_e_ [private] |
Definition at line 270 of file sac_segmentation.h.
std::string pcl_ros::SACSegmentationFromNormals::tf_input_frame_ [protected] |
The input TF frame the data should be transformed into, if input.header.frame_id is different.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 232 of file sac_segmentation.h.
std::string pcl_ros::SACSegmentationFromNormals::tf_input_orig_frame_ [protected] |
The original data input TF frame.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 234 of file sac_segmentation.h.
std::string pcl_ros::SACSegmentationFromNormals::tf_output_frame_ [protected] |
The output TF frame the data should be transformed into, if input.header.frame_id is different.
Reimplemented from pcl_ros::SACSegmentation.
Definition at line 236 of file sac_segmentation.h.
The documentation for this class was generated from the following files: