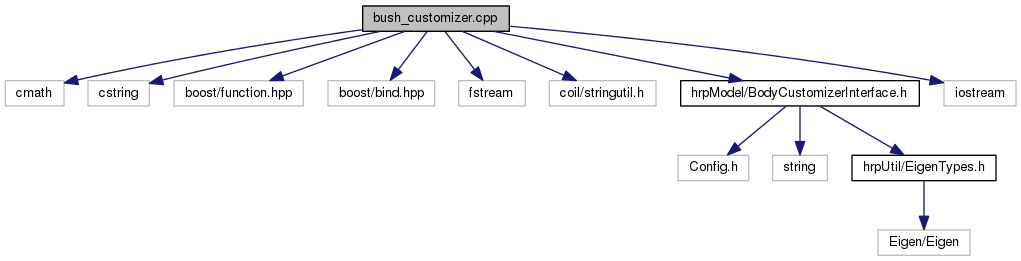
#include <cmath>#include <cstring>#include <boost/function.hpp>#include <boost/bind.hpp>#include <fstream>#include <coil/stringutil.h>#include <hrpModel/BodyCustomizerInterface.h>#include <iostream>
Include dependency graph for bush_customizer.cpp:
Go to the source code of this file.
Classes | |
| struct | BushCustomizer |
| struct | BushCustomizerParam |
| struct | JointValSet |
Defines | |
| #define | DLL_EXPORT |
| #define | NS_HRPMODEL OpenHRP |
Typedefs | |
| typedef OpenHRP::matrix33 | Matrix33 |
| typedef OpenHRP::vector3 | Vector3 |
Functions | |
| static BodyCustomizerHandle | create (BodyHandle bodyHandle, const char *modelName) |
| static void | destroy (BodyCustomizerHandle customizerHandle) |
| DLL_EXPORT NS_HRPMODEL::BodyCustomizerInterface * | getHrpBodyCustomizerInterface (NS_HRPMODEL::BodyInterface *bodyInterface_) |
| static const char ** | getTargetModelNames () |
| static void | getVirtualbushJoints (BushCustomizer *customizer, BodyHandle body) |
| static void | setVirtualJointForces (BodyCustomizerHandle customizerHandle) |
Variables | |
| static BodyCustomizerInterface | bodyCustomizerInterface |
| static BodyInterface * | bodyInterface = 0 |
| static coil::vstring | bush_config |
| static std::string | robot_model_name |
Define Documentation
| #define DLL_EXPORT |
Definition at line 20 of file bush_customizer.cpp.
| #define NS_HRPMODEL OpenHRP |
Definition at line 39 of file bush_customizer.cpp.
Typedef Documentation
| typedef OpenHRP::matrix33 Matrix33 |
Definition at line 41 of file bush_customizer.cpp.
| typedef OpenHRP::vector3 Vector3 |
Definition at line 40 of file bush_customizer.cpp.
Function Documentation
Definition at line 126 of file bush_customizer.cpp.
Definition at line 146 of file bush_customizer.cpp.
| DLL_EXPORT NS_HRPMODEL::BodyCustomizerInterface* getHrpBodyCustomizerInterface | ( | NS_HRPMODEL::BodyInterface * | bodyInterface_ | ) |
Definition at line 168 of file bush_customizer.cpp.
| static const char** getTargetModelNames | ( | ) | [static] |
Definition at line 87 of file bush_customizer.cpp.
| static void getVirtualbushJoints | ( | BushCustomizer * | customizer, |
| BodyHandle | body | ||
| ) | [static] |
Definition at line 95 of file bush_customizer.cpp.
| static void setVirtualJointForces | ( | BodyCustomizerHandle | customizerHandle | ) | [static] |
Definition at line 154 of file bush_customizer.cpp.
Variable Documentation
BodyCustomizerInterface bodyCustomizerInterface [static] |
Definition at line 50 of file bush_customizer.cpp.
BodyInterface* bodyInterface = 0 [static] |
Definition at line 48 of file bush_customizer.cpp.
coil::vstring bush_config [static] |
Definition at line 85 of file bush_customizer.cpp.
std::string robot_model_name [static] |
Definition at line 80 of file bush_customizer.cpp.