Sample component $Date$. More...
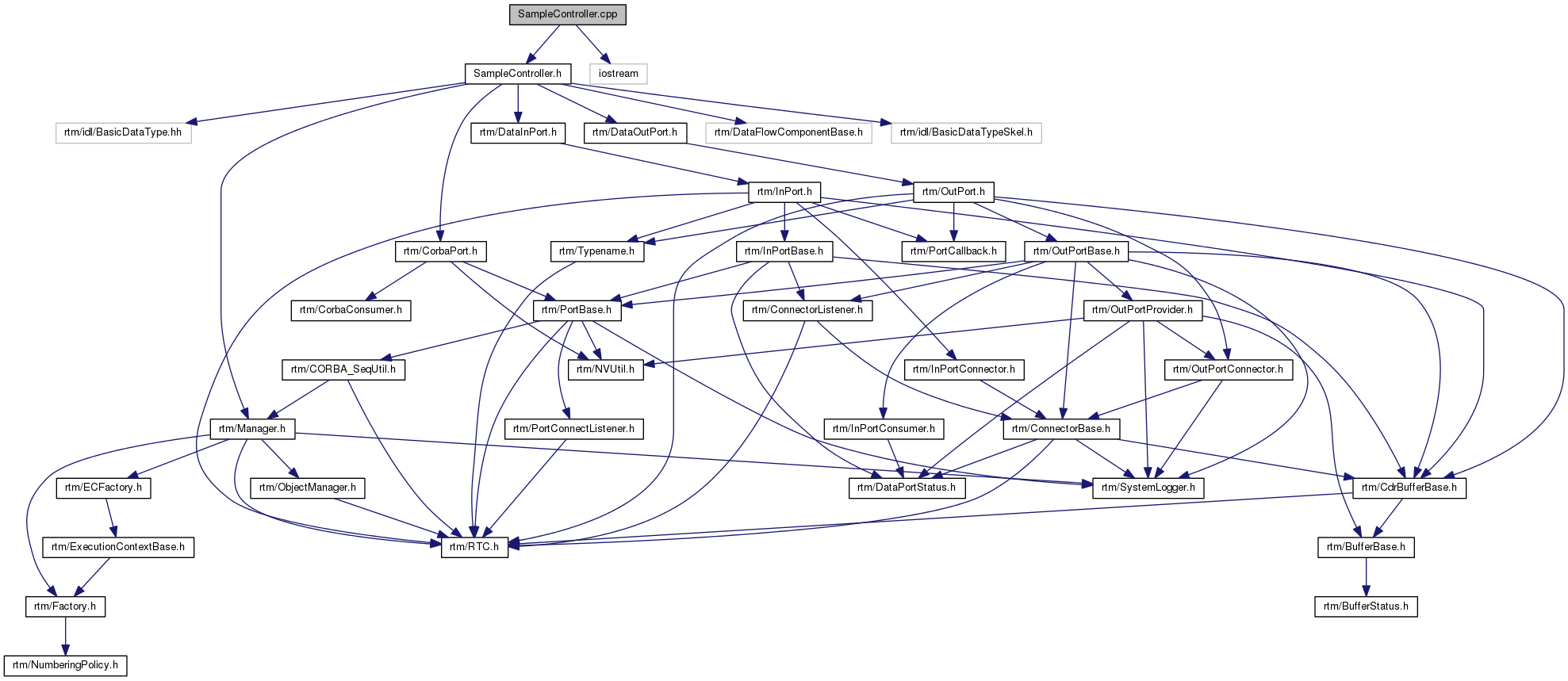
Include dependency graph for SampleController.cpp:
Go to the source code of this file.
Defines | |
| #define | ANGLE_FILE "etc/Sample.pos" |
| #define | GAIN_FILE "etc/SR_PDgain.dat" |
| #define | RARM_ELBOW 9 |
| #define | RARM_SHOULDER_P 6 |
| #define | RARM_SHOULDER_R 7 |
| #define | RARM_WRIST_R 12 |
| #define | RARM_WRIST_Y 10 |
| #define | TIMESTEP 0.002 |
| #define | VEL_FILE "etc/Sample.vel" |
Functions | |
| DLL_EXPORT void | SampleControllerInit (RTC::Manager *manager) |
Variables | |
| static const char * | samplecontroller_spec [] |
Detailed Description
Define Documentation
| #define ANGLE_FILE "etc/Sample.pos" |
Definition at line 24 of file SampleController.cpp.
| #define GAIN_FILE "etc/SR_PDgain.dat" |
Definition at line 26 of file SampleController.cpp.
| #define RARM_ELBOW 9 |
Definition at line 30 of file SampleController.cpp.
| #define RARM_SHOULDER_P 6 |
Definition at line 28 of file SampleController.cpp.
| #define RARM_SHOULDER_R 7 |
Definition at line 29 of file SampleController.cpp.
| #define RARM_WRIST_R 12 |
Definition at line 32 of file SampleController.cpp.
| #define RARM_WRIST_Y 10 |
Definition at line 31 of file SampleController.cpp.
| #define TIMESTEP 0.002 |
Definition at line 22 of file SampleController.cpp.
| #define VEL_FILE "etc/Sample.vel" |
Definition at line 25 of file SampleController.cpp.
Function Documentation
| DLL_EXPORT void SampleControllerInit | ( | RTC::Manager * | manager | ) |
Definition at line 385 of file SampleController.cpp.
Variable Documentation
const char* samplecontroller_spec[] [static] |
Initial value:
{
"implementation_id", "SampleController",
"type_name", "SampleController",
"description", "Sample component",
"version", "0.1",
"vendor", "AIST",
"category", "Generic",
"activity_type", "DataFlowComponent",
"max_instance", "10",
"language", "C++",
"lang_type", "compile",
""
}
Definition at line 40 of file SampleController.cpp.