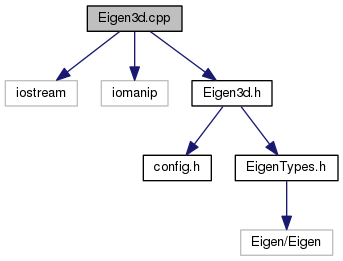
Include dependency graph for Eigen3d.cpp:
Go to the source code of this file.
Variables | |
| static const double | PI = 3.14159265358979323846 |
Variable Documentation
Definition at line 19 of file Eigen3d.cpp.
Go to the source code of this file.
Variables | |
| static const double | PI = 3.14159265358979323846 |
Definition at line 19 of file Eigen3d.cpp.