Public Member Functions | |
| virtual void | onInit () |
| Initialize nodehandles nh_ and pnh_. Subclass should call this method in its onInit method. | |
Private Types | |
| typedef message_filters::sync_policies::ApproximateTime < sensor_msgs::Image, sensor_msgs::Image > | ApproxSyncPolicy |
| typedef message_filters::sync_policies::ApproximateTime < sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::CameraInfo > | ApproxSyncPolicyWithCameraInfo |
| typedef adding_images::AddingImagesConfig | Config |
| typedef dynamic_reconfigure::Server < Config > | ReconfigureServer |
| typedef message_filters::sync_policies::ExactTime < sensor_msgs::Image, sensor_msgs::Image > | SyncPolicy |
| typedef message_filters::sync_policies::ExactTime < sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::CameraInfo > | SyncPolicyWithCameraInfo |
Private Member Functions | |
| void | do_work (const sensor_msgs::Image::ConstPtr &image_msg1, const sensor_msgs::Image::ConstPtr &image_msg2, const std::string input_frame_from_msg) |
| void | imageCallback (const sensor_msgs::ImageConstPtr &msg1, const sensor_msgs::ImageConstPtr &msg2) |
| void | imageCallbackWithInfo (const sensor_msgs::ImageConstPtr &msg1, const sensor_msgs::ImageConstPtr &msg2, const sensor_msgs::CameraInfoConstPtr &cam_info) |
| void | reconfigureCallback (Config &config, uint32_t level) |
| void | subscribe () |
| This method is called when publisher is subscribed by other nodes. Set up subscribers in this method. | |
| void | unsubscribe () |
| This method is called when publisher is unsubscribed by other nodes. Shut down subscribers in this method. | |
Private Attributes | |
| double | alpha_ |
| bool | approximate_sync_ |
| boost::shared_ptr < message_filters::Synchronizer < ApproxSyncPolicy > > | async_ |
| boost::shared_ptr < message_filters::Synchronizer < ApproxSyncPolicyWithCameraInfo > > | async_with_info_ |
| double | beta_ |
| Config | config_ |
| bool | debug_view_ |
| double | gamma_ |
| image_transport::Publisher | img_pub_ |
| boost::shared_ptr < image_transport::ImageTransport > | it_ |
| boost::mutex | mutex_ |
| ros::Time | prev_stamp_ |
| boost::shared_ptr < ReconfigureServer > | reconfigure_server_ |
| message_filters::Subscriber < sensor_msgs::CameraInfo > | sub_camera_info_ |
| image_transport::SubscriberFilter | sub_image1_ |
| image_transport::SubscriberFilter | sub_image2_ |
| boost::shared_ptr < message_filters::Synchronizer < SyncPolicy > > | sync_ |
| boost::shared_ptr < message_filters::Synchronizer < SyncPolicyWithCameraInfo > > | sync_with_info_ |
| std::string | window_name_ |
Detailed Description
Definition at line 59 of file adding_images_nodelet.cpp.
Member Typedef Documentation
typedef message_filters::sync_policies::ApproximateTime< sensor_msgs::Image, sensor_msgs::Image> adding_images::AddingImagesNodelet::ApproxSyncPolicy [private] |
Definition at line 70 of file adding_images_nodelet.cpp.
typedef message_filters::sync_policies::ApproximateTime< sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::CameraInfo> adding_images::AddingImagesNodelet::ApproxSyncPolicyWithCameraInfo [private] |
Definition at line 66 of file adding_images_nodelet.cpp.
typedef adding_images::AddingImagesConfig adding_images::AddingImagesNodelet::Config [private] |
Definition at line 75 of file adding_images_nodelet.cpp.
typedef dynamic_reconfigure::Server<Config> adding_images::AddingImagesNodelet::ReconfigureServer [private] |
Definition at line 76 of file adding_images_nodelet.cpp.
typedef message_filters::sync_policies::ExactTime< sensor_msgs::Image, sensor_msgs::Image> adding_images::AddingImagesNodelet::SyncPolicy [private] |
Definition at line 68 of file adding_images_nodelet.cpp.
typedef message_filters::sync_policies::ExactTime< sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::CameraInfo> adding_images::AddingImagesNodelet::SyncPolicyWithCameraInfo [private] |
Definition at line 64 of file adding_images_nodelet.cpp.
Member Function Documentation
| void adding_images::AddingImagesNodelet::do_work | ( | const sensor_msgs::Image::ConstPtr & | image_msg1, |
| const sensor_msgs::Image::ConstPtr & | image_msg2, | ||
| const std::string | input_frame_from_msg | ||
| ) | [inline, private] |
Definition at line 167 of file adding_images_nodelet.cpp.
| void adding_images::AddingImagesNodelet::imageCallback | ( | const sensor_msgs::ImageConstPtr & | msg1, |
| const sensor_msgs::ImageConstPtr & | msg2 | ||
| ) | [inline, private] |
Definition at line 106 of file adding_images_nodelet.cpp.
| void adding_images::AddingImagesNodelet::imageCallbackWithInfo | ( | const sensor_msgs::ImageConstPtr & | msg1, |
| const sensor_msgs::ImageConstPtr & | msg2, | ||
| const sensor_msgs::CameraInfoConstPtr & | cam_info | ||
| ) | [inline, private] |
Definition at line 99 of file adding_images_nodelet.cpp.
| virtual void adding_images::AddingImagesNodelet::onInit | ( | ) | [inline, virtual] |
Initialize nodehandles nh_ and pnh_. Subclass should call this method in its onInit method.
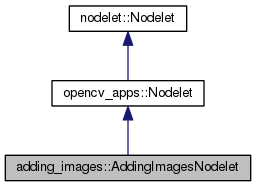
Reimplemented from opencv_apps::Nodelet.
Definition at line 219 of file adding_images_nodelet.cpp.
| void adding_images::AddingImagesNodelet::reconfigureCallback | ( | Config & | config, |
| uint32_t | level | ||
| ) | [inline, private] |
Definition at line 154 of file adding_images_nodelet.cpp.
| void adding_images::AddingImagesNodelet::subscribe | ( | ) | [inline, private, virtual] |
This method is called when publisher is subscribed by other nodes. Set up subscribers in this method.
Implements opencv_apps::Nodelet.
Definition at line 111 of file adding_images_nodelet.cpp.
| void adding_images::AddingImagesNodelet::unsubscribe | ( | ) | [inline, private, virtual] |
This method is called when publisher is unsubscribed by other nodes. Shut down subscribers in this method.
Implements opencv_apps::Nodelet.
Definition at line 147 of file adding_images_nodelet.cpp.
Member Data Documentation
double adding_images::AddingImagesNodelet::alpha_ [private] |
Definition at line 95 of file adding_images_nodelet.cpp.
bool adding_images::AddingImagesNodelet::approximate_sync_ [private] |
Definition at line 94 of file adding_images_nodelet.cpp.
boost::shared_ptr<message_filters::Synchronizer<ApproxSyncPolicy> > adding_images::AddingImagesNodelet::async_ [private] |
Definition at line 91 of file adding_images_nodelet.cpp.
boost::shared_ptr<message_filters::Synchronizer<ApproxSyncPolicyWithCameraInfo> > adding_images::AddingImagesNodelet::async_with_info_ [private] |
Definition at line 89 of file adding_images_nodelet.cpp.
double adding_images::AddingImagesNodelet::beta_ [private] |
Definition at line 96 of file adding_images_nodelet.cpp.
Definition at line 77 of file adding_images_nodelet.cpp.
bool adding_images::AddingImagesNodelet::debug_view_ [private] |
Definition at line 80 of file adding_images_nodelet.cpp.
double adding_images::AddingImagesNodelet::gamma_ [private] |
Definition at line 97 of file adding_images_nodelet.cpp.
Definition at line 86 of file adding_images_nodelet.cpp.
boost::shared_ptr<image_transport::ImageTransport> adding_images::AddingImagesNodelet::it_ [private] |
Definition at line 61 of file adding_images_nodelet.cpp.
boost::mutex adding_images::AddingImagesNodelet::mutex_ [private] |
Definition at line 92 of file adding_images_nodelet.cpp.
Definition at line 81 of file adding_images_nodelet.cpp.
boost::shared_ptr<ReconfigureServer> adding_images::AddingImagesNodelet::reconfigure_server_ [private] |
Definition at line 78 of file adding_images_nodelet.cpp.
message_filters::Subscriber<sensor_msgs::CameraInfo> adding_images::AddingImagesNodelet::sub_camera_info_ [private] |
Definition at line 87 of file adding_images_nodelet.cpp.
Definition at line 85 of file adding_images_nodelet.cpp.
Definition at line 85 of file adding_images_nodelet.cpp.
boost::shared_ptr<message_filters::Synchronizer<SyncPolicy> > adding_images::AddingImagesNodelet::sync_ [private] |
Definition at line 90 of file adding_images_nodelet.cpp.
boost::shared_ptr<message_filters::Synchronizer<SyncPolicyWithCameraInfo> > adding_images::AddingImagesNodelet::sync_with_info_ [private] |
Definition at line 88 of file adding_images_nodelet.cpp.
std::string adding_images::AddingImagesNodelet::window_name_ [private] |
Definition at line 83 of file adding_images_nodelet.cpp.
The documentation for this class was generated from the following file: