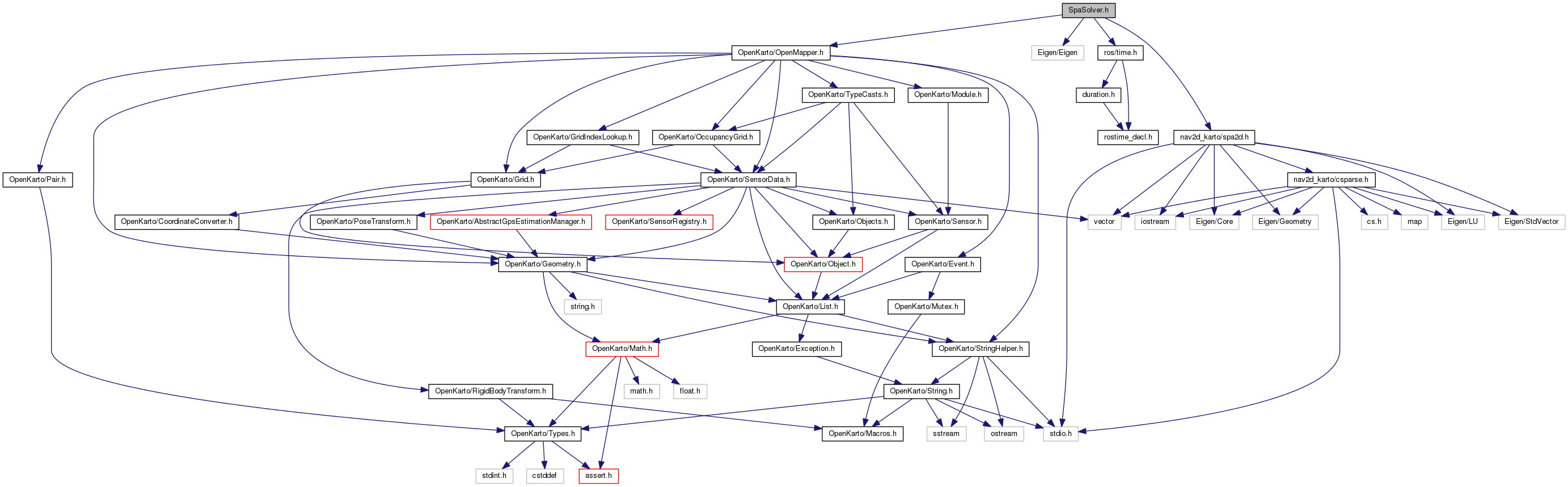
#include "OpenKarto/OpenMapper.h"#include <Eigen/Eigen>#include <ros/time.h>#include <nav2d_karto/spa2d.h>
Include dependency graph for SpaSolver.h:
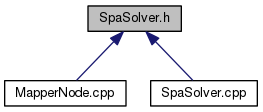
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | SpaSolver |
Defines | |
| #define | EIGEN_DEFAULT_IO_FORMAT Eigen::IOFormat(10) |
| #define | EIGEN_USE_NEW_STDVECTOR |
Typedefs | |
| typedef std::vector < karto::Matrix3 > | CovarianceVector |
Define Documentation
| #define EIGEN_DEFAULT_IO_FORMAT Eigen::IOFormat(10) |
Definition at line 27 of file SpaSolver.h.
| #define EIGEN_USE_NEW_STDVECTOR |
Definition at line 24 of file SpaSolver.h.
Typedef Documentation
| typedef std::vector<karto::Matrix3> CovarianceVector |
Definition at line 34 of file SpaSolver.h.