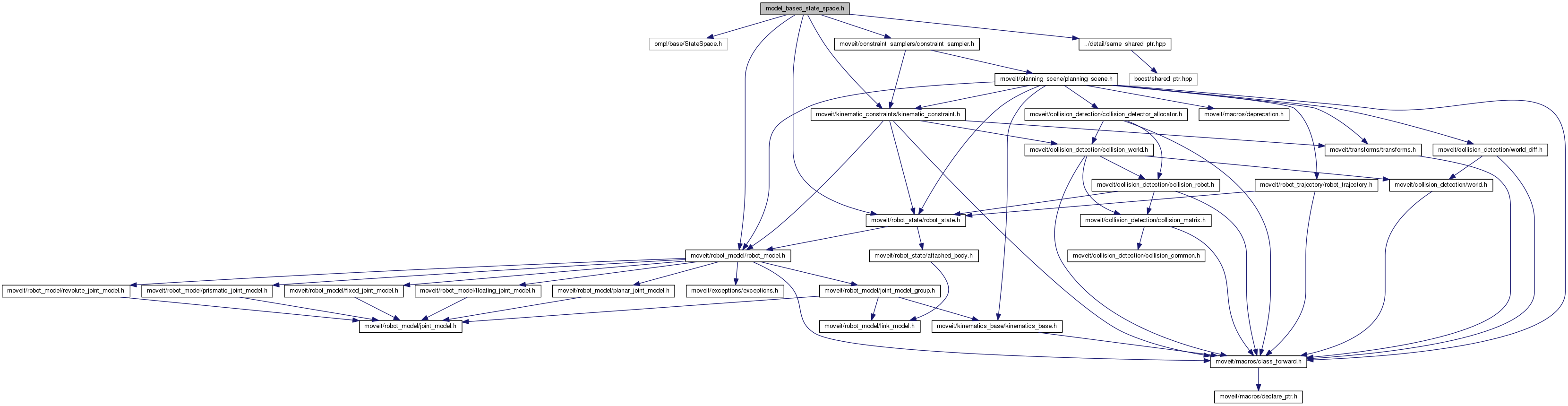
#include <ompl/base/StateSpace.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <moveit/kinematic_constraints/kinematic_constraint.h>#include <moveit/constraint_samplers/constraint_sampler.h>#include "../detail/same_shared_ptr.hpp"
Include dependency graph for model_based_state_space.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | ompl_interface::ModelBasedStateSpace |
| struct | ompl_interface::ModelBasedStateSpaceSpecification |
| class | ompl_interface::ModelBasedStateSpace::StateType |
Namespaces | |
| namespace | ompl_interface |
The MoveIt interface to OMPL. | |
Typedefs | |
| typedef boost::function < double(const ompl::base::State *state1, const ompl::base::State *state2) | ompl_interface::DistanceFunction ) |
| typedef boost::function< bool(const ompl::base::State *from, const ompl::base::State *to, const double t, ompl::base::State *state) | ompl_interface::InterpolationFunction ) |
| typedef same_shared_ptr < ModelBasedStateSpace, ompl::base::StateSpacePtr > ::type | ompl_interface::ModelBasedStateSpacePtr |