#include <moveit/macros/class_forward.h>#include <moveit/exceptions/exceptions.h>#include <console_bridge/console.h>#include <urdf_model/model.h>#include <srdfdom/model.h>#include <moveit/robot_model/joint_model_group.h>#include <moveit/robot_model/fixed_joint_model.h>#include <moveit/robot_model/floating_joint_model.h>#include <moveit/robot_model/planar_joint_model.h>#include <moveit/robot_model/revolute_joint_model.h>#include <moveit/robot_model/prismatic_joint_model.h>#include <Eigen/Geometry>#include <iostream>
Include dependency graph for robot_model.h:

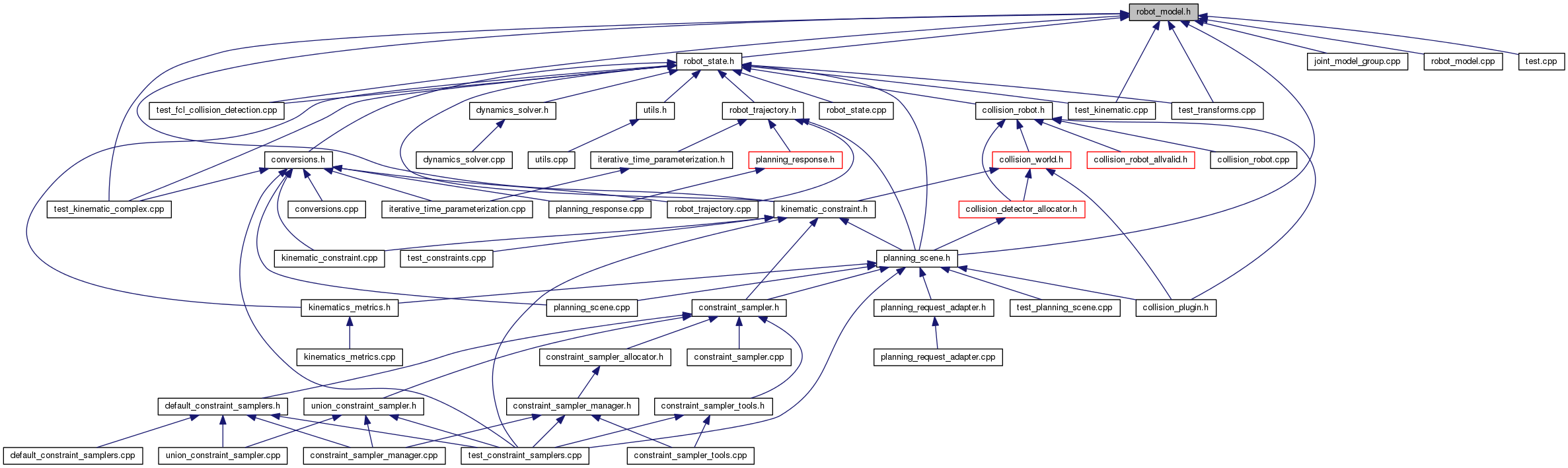
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit::core::RobotModel |
| Definition of a kinematic model. This class is not thread safe, however multiple instances can be created. More... | |
Namespaces | |
| namespace | moveit |
Main namespace for MoveIt! | |
| namespace | moveit::core |
Core components of MoveIt! | |
Functions | |
| moveit::core::MOVEIT_CLASS_FORWARD (RobotModel) | |