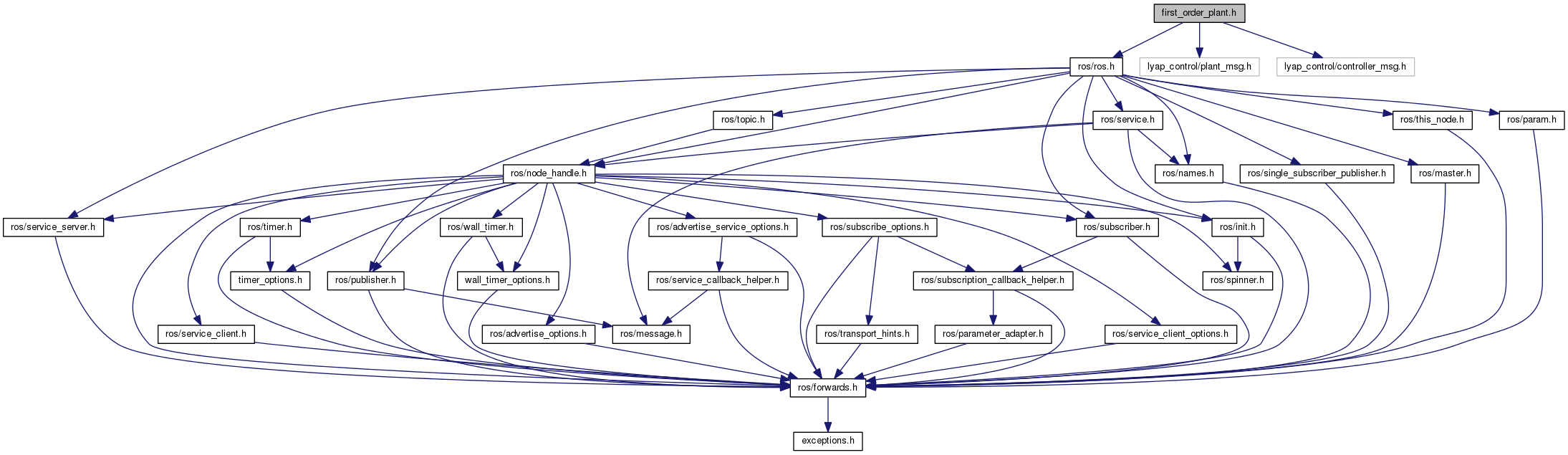
Include dependency graph for first_order_plant.h:
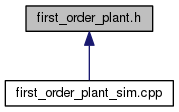
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | chatterCallback (const lyap_control::controller_msg &u_msg) |
Variables | |
| double | delta_t = 0.001 |
| static const int | num_inputs = 1 |
| static const int | num_states = 1 |
| static const double | setpoint [num_states] = {-1.0} |
| static const double | t_IC = 0.0 |
| static double | u [num_inputs] = {0} |
| static const double | x_IC [num_states] = {4.7} |
Function Documentation
| void chatterCallback | ( | const lyap_control::controller_msg & | u_msg | ) |
Definition at line 58 of file first_order_plant_sim.cpp.
Variable Documentation
| double delta_t = 0.001 |
Definition at line 21 of file first_order_plant.h.
const int num_inputs = 1 [static] |
Definition at line 14 of file first_order_plant.h.
const int num_states = 1 [static] |
Definition at line 13 of file first_order_plant.h.
const double setpoint[num_states] = {-1.0} [static] |
Definition at line 19 of file first_order_plant.h.
const double t_IC = 0.0 [static] |
Definition at line 18 of file first_order_plant.h.
double u[num_inputs] = {0} [static] |
Definition at line 24 of file first_order_plant.h.
const double x_IC[num_states] = {4.7} [static] |
Definition at line 17 of file first_order_plant.h.