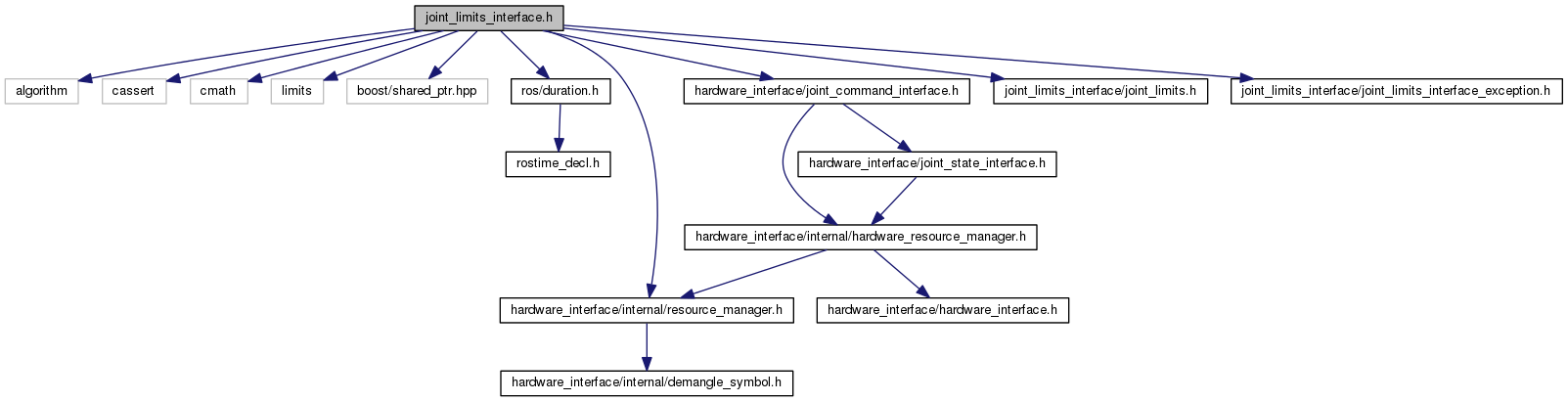
#include <algorithm>#include <cassert>#include <cmath>#include <limits>#include <boost/shared_ptr.hpp>#include <ros/duration.h>#include <hardware_interface/internal/resource_manager.h>#include <hardware_interface/joint_command_interface.h>#include <joint_limits_interface/joint_limits.h>#include <joint_limits_interface/joint_limits_interface_exception.h>
Include dependency graph for joint_limits_interface.h:
Go to the source code of this file.
Classes | |
| class | joint_limits_interface::EffortJointSaturationHandle |
| A handle used to enforce position, velocity, and effort limits of an effort-controlled joint that does not have soft limits. More... | |
| class | joint_limits_interface::EffortJointSaturationInterface |
| class | joint_limits_interface::EffortJointSoftLimitsHandle |
| A handle used to enforce position, velocity and effort limits of an effort-controlled joint. More... | |
| class | joint_limits_interface::EffortJointSoftLimitsInterface |
| class | joint_limits_interface::JointLimitsInterface< HandleType > |
| Interface for enforcing joint limits. More... | |
| class | joint_limits_interface::PositionJointSaturationHandle |
| A handle used to enforce position and velocity limits of a position-controlled joint that does not have soft limits. More... | |
| class | joint_limits_interface::PositionJointSaturationInterface |
| class | joint_limits_interface::PositionJointSoftLimitsHandle |
| A handle used to enforce position and velocity limits of a position-controlled joint. More... | |
| class | joint_limits_interface::PositionJointSoftLimitsInterface |
| class | joint_limits_interface::VelocityJointSaturationHandle |
| A handle used to enforce velocity and acceleration limits of a velocity-controlled joint. More... | |
| class | joint_limits_interface::VelocityJointSaturationInterface |
| class | joint_limits_interface::VelocityJointSoftLimitsHandle |
| A handle used to enforce position, velocity, and acceleration limits of a velocity-controlled joint. More... | |
| class | joint_limits_interface::VelocityJointSoftLimitsInterface |
Namespaces | |
| namespace | joint_limits_interface |
| namespace | joint_limits_interface::internal |
Functions | |
| template<typename T > | |
| T | joint_limits_interface::internal::saturate (const T val, const T min_val, const T max_val) |