#include <nonminimalkalmanfilter.h>
Public Member Functions | |
| virtual void | MeasUpdate (MeasurementModel< ColumnVector, ColumnVector > *const measmodel, const ColumnVector &z, const ColumnVector &s) |
| NonminimalKalmanFilter (Gaussian *prior, unsigned int NrIterations, vector< NLSysModel * > minimalsysmodels, vector< NLMeasModel * > minimalmeasmodels, vector< GiNaC::symbol > nonlinearstate=*(new vector< GiNaC::symbol >)) | |
| virtual void | SysUpdate (SystemModel< ColumnVector > *const sysmodel, const ColumnVector &u) |
| virtual | ~NonminimalKalmanFilter () |
| Destructor. | |
Private Attributes | |
| Linearise * | Linear |
| IteratedExtendedKalmanFilter * | MinimalFilter |
| NLMeasModel * | MinimalMeasModel |
| Gaussian * | MinimalPrior |
| vector< GiNaC::symbol > | MinimalState |
| IteratedExtendedKalmanFilter * | NonminimalFilter |
| Gaussian * | NonminimalPrior |
| vector< GiNaC::symbol > | NonminimalState |
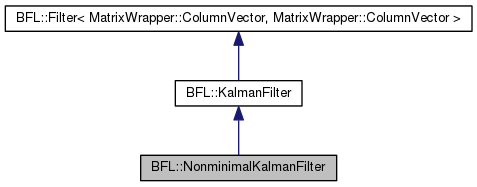
Detailed Description
This is a class implementing the Kalman Filter (KF) class for Non Minimal State Kalman Filters.
The System- and MeasurementUpdate equasions are not linear. Substituting the state by a non-minimal state will make the System- and MeasurementUpdate linear in the non-minimal state
- See also:
- KalmanFilter
- Todo:
- Seriously reimplement this class!
Definition at line 47 of file nonminimalkalmanfilter.h.
Constructor & Destructor Documentation
| BFL::NonminimalKalmanFilter::NonminimalKalmanFilter | ( | Gaussian * | prior, |
| unsigned int | NrIterations, | ||
| vector< NLSysModel * > | minimalsysmodels, | ||
| vector< NLMeasModel * > | minimalmeasmodels, | ||
| vector< GiNaC::symbol > | nonlinearstate = *(new vector<GiNaC::symbol>) |
||
| ) |
Constructor
- Precondition:
- you created the prior
- Parameters:
-
prior pointer to the Gaussian prior density NrIterations Number of iterations that will be used (this class uses 2 IEKF: one for the minimal state and one for the nonminimal state) minimalsysmodels vector of measurement models that can be used for measurement updates minimalmeasmodels vector of system models that can be used for system updates nonlinearstate symbols of state in wich the filter should be linearised
Definition at line 30 of file nonminimalkalmanfilter.cpp.
| BFL::NonminimalKalmanFilter::~NonminimalKalmanFilter | ( | ) | [virtual] |
Destructor.
Definition at line 71 of file nonminimalkalmanfilter.cpp.
Member Function Documentation
| void BFL::NonminimalKalmanFilter::MeasUpdate | ( | MeasurementModel< ColumnVector, ColumnVector > *const | measmodel, |
| const ColumnVector & | z, | ||
| const ColumnVector & | s | ||
| ) | [virtual] |
Definition at line 88 of file nonminimalkalmanfilter.cpp.
| void BFL::NonminimalKalmanFilter::SysUpdate | ( | SystemModel< ColumnVector > *const | sysmodel, |
| const ColumnVector & | u | ||
| ) | [virtual] |
Definition at line 81 of file nonminimalkalmanfilter.cpp.
Member Data Documentation
Linearise* BFL::NonminimalKalmanFilter::Linear [private] |
Definition at line 77 of file nonminimalkalmanfilter.h.
Definition at line 78 of file nonminimalkalmanfilter.h.
Definition at line 80 of file nonminimalkalmanfilter.h.
Gaussian * BFL::NonminimalKalmanFilter::MinimalPrior [private] |
Definition at line 79 of file nonminimalkalmanfilter.h.
vector<GiNaC::symbol> BFL::NonminimalKalmanFilter::MinimalState [private] |
Definition at line 76 of file nonminimalkalmanfilter.h.
Definition at line 78 of file nonminimalkalmanfilter.h.
Definition at line 79 of file nonminimalkalmanfilter.h.
vector<GiNaC::symbol> BFL::NonminimalKalmanFilter::NonminimalState [private] |
Definition at line 76 of file nonminimalkalmanfilter.h.
The documentation for this class was generated from the following files: