#include <yumi_test_controllers.h>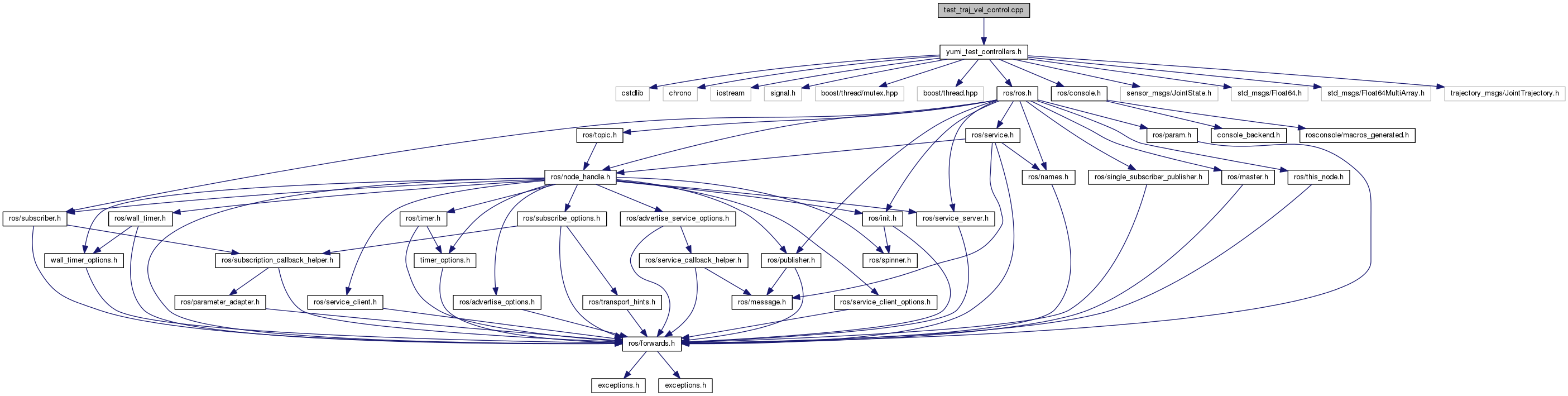
Go to the source code of this file.
Functions | |
| void | joint_states_callback (const sensor_msgs::JointState &msg) |
| void | left_vel_controller_callback (const ros::SingleSubscriberPublisher &pub) |
| int | main (int argc, char *argv[]) |
| void | right_vel_controller_callback (const ros::SingleSubscriberPublisher &pub) |
Variables | |
| sensor_msgs::JointState | joints_state |
| bool | left_command_sent = false |
| ros::Publisher | left_pub |
| trajectory_msgs::JointTrajectory | left_traj |
| int | num_joints = 14 |
| int | num_joints_arm = 7 |
| int | numSubscribersConnected = 0 |
| bool | right_command_sent = false |
| ros::Publisher | right_pub |
| trajectory_msgs::JointTrajectory | right_traj |
| ros::Subscriber | sub |
Function Documentation
| void joint_states_callback | ( | const sensor_msgs::JointState & | msg | ) |
Definition at line 39 of file test_traj_vel_control.cpp.
| void left_vel_controller_callback | ( | const ros::SingleSubscriberPublisher & | pub | ) |
Definition at line 23 of file test_traj_vel_control.cpp.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 98 of file test_traj_vel_control.cpp.
| void right_vel_controller_callback | ( | const ros::SingleSubscriberPublisher & | pub | ) |
Definition at line 30 of file test_traj_vel_control.cpp.
Variable Documentation
| sensor_msgs::JointState joints_state |
Definition at line 5 of file test_traj_vel_control.cpp.
| bool left_command_sent = false |
Definition at line 13 of file test_traj_vel_control.cpp.
Definition at line 16 of file test_traj_vel_control.cpp.
| trajectory_msgs::JointTrajectory left_traj |
Definition at line 6 of file test_traj_vel_control.cpp.
| int num_joints = 14 |
Definition at line 11 of file test_traj_vel_control.cpp.
| int num_joints_arm = 7 |
Definition at line 12 of file test_traj_vel_control.cpp.
| int numSubscribersConnected = 0 |
Definition at line 10 of file test_traj_vel_control.cpp.
| bool right_command_sent = false |
Definition at line 14 of file test_traj_vel_control.cpp.
Definition at line 17 of file test_traj_vel_control.cpp.
| trajectory_msgs::JointTrajectory right_traj |
Definition at line 7 of file test_traj_vel_control.cpp.
Definition at line 18 of file test_traj_vel_control.cpp.