#include "urg_c/urg_sensor.h"#include "urg_c/urg_errno.h"#include <stddef.h>#include <string.h>#include <stdio.h>#include <stdlib.h>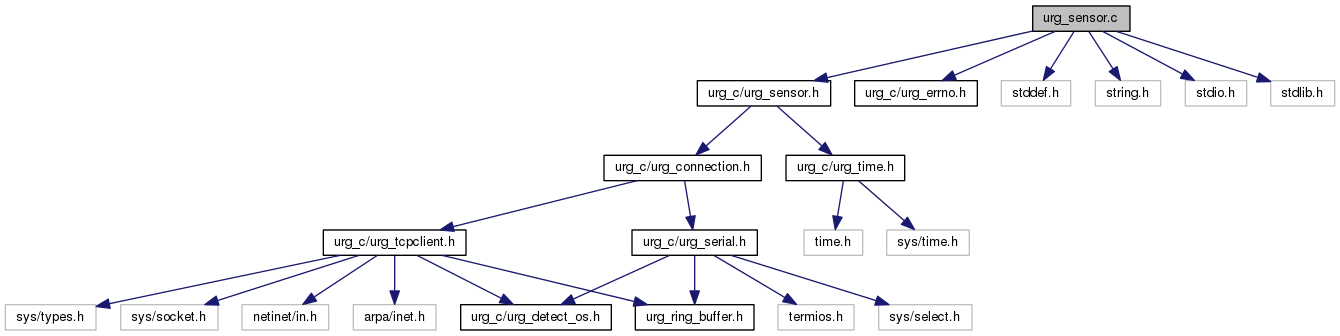
Go to the source code of this file.
Enumerations | |
| enum | { URG_FALSE = 0, URG_TRUE = 1, BUFFER_SIZE = 64 + 2 + 6, EXPECTED_END = -1, RECEIVE_DATA_TIMEOUT, RECEIVE_DATA_COMPLETE, PP_RESPONSE_LINES = 10, VV_RESPONSE_LINES = 7, II_RESPONSE_LINES = 9, MAX_TIMEOUT = 140 } |
| URG センサ制御 More... | |
Functions | |
| static int | change_sensor_baudrate (urg_t *urg, long current_baudrate, long next_baudrate) |
| static int | connect_urg_device (urg_t *urg, long baudrate) |
| static char * | copy_token (char *dest, char *receive_buffer, const char *start_str, const char *end_ch, int lines) |
| static void | ignore_receive_data (urg_t *urg, int timeout) |
| static void | ignore_receive_data_with_qt (urg_t *urg, int timeout) |
| static urg_measurement_type_t | parse_distance_echoback (urg_t *urg, const char echoback[]) |
| static urg_measurement_type_t | parse_distance_parameter (urg_t *urg, const char echoback[]) |
| static int | parse_parameter (const char *parameter, int size) |
| static const char * | receive_command_response (urg_t *urg, char *buffer, int buffer_size, const char *command, int response_lines) |
| static int | receive_data (urg_t *urg, long data[], unsigned short intensity[], long *time_stamp, unsigned long long *system_time_stamp) |
| 距離データの取得 | |
| static int | receive_length_data (urg_t *urg, long length[], unsigned short intensity[], urg_measurement_type_t type, char buffer[]) |
| static int | receive_parameter (urg_t *urg) |
| static char | scip_checksum (const char buffer[], int size) |
| チェックサムの計算 | |
| static int | scip_response (urg_t *urg, const char *command, const int expected_ret[], int timeout, char *receive_buffer, int receive_buffer_max_size) |
| static int | send_distance_command (urg_t *urg, int scan_times, int skip_scan, char single_scan_ch, char continuous_scan_ch, char scan_type_ch) |
| static int | set_errno_and_return (urg_t *urg, int urg_errno) |
| void | urg_close (urg_t *urg) |
| int | urg_get_distance (urg_t *urg, long data[], long *time_stamp, unsigned long long *system_time_stamp) |
| int | urg_get_distance_intensity (urg_t *urg, long data[], unsigned short intensity[], long *time_stamp, unsigned long long *system_time_stamp) |
| int | urg_get_multiecho (urg_t *urg, long data_multi[], long *time_stamp, unsigned long long *system_time_stamp) |
| int | urg_get_multiecho_intensity (urg_t *urg, long data_multi[], unsigned short intensity_multi[], long *time_stamp, unsigned long long *system_time_stamp) |
| int | urg_is_stable (urg_t *urg) |
| int | urg_laser_off (urg_t *urg) |
| int | urg_laser_on (urg_t *urg) |
| int | urg_open (urg_t *urg, urg_connection_type_t connection_type, const char *device_or_address, long baudrate_or_port) |
| int | urg_reboot (urg_t *urg) |
| long | urg_scip_decode (const char data[], int size) |
| SCIP 文字列のデコード | |
| const char * | urg_sensor_firmware_date (urg_t *urg) |
| const char * | urg_sensor_firmware_version (urg_t *urg) |
| const char * | urg_sensor_product_type (urg_t *urg) |
| const char * | urg_sensor_protocol_version (urg_t *urg) |
| returns the protocol version | |
| const char * | urg_sensor_serial_id (urg_t *urg) |
| const char * | urg_sensor_state (urg_t *urg) |
| const char * | urg_sensor_status (urg_t *urg) |
| const char * | urg_sensor_vendor (urg_t *urg) |
| returns the vendor name | |
| int | urg_set_connection_data_size (urg_t *urg, urg_range_data_byte_t data_byte) |
| void | urg_set_error_handler (urg_t *urg, urg_error_handler handler) |
| int | urg_set_scanning_parameter (urg_t *urg, int first_step, int last_step, int skip_step) |
| void | urg_set_timeout_msec (urg_t *urg, int msec) |
| タイムアウト時間の設定 | |
| void | urg_sleep (urg_t *urg) |
| int | urg_start_measurement (urg_t *urg, urg_measurement_type_t type, int scan_times, int skip_scan) |
| int | urg_start_time_stamp_mode (urg_t *urg) |
| int | urg_stop_measurement (urg_t *urg) |
| int | urg_stop_time_stamp_mode (urg_t *urg) |
| long | urg_time_stamp (urg_t *urg) |
| void | urg_wakeup (urg_t *urg) |
Variables | |
| static const char | NOT_CONNECTED_MESSAGE [] = "not connected." |
| static const char | RECEIVE_ERROR_MESSAGE [] = "receive error." |
Enumeration Type Documentation
| anonymous enum |
URG センサ制御
- Id:
- urg_sensor.c,v 66816edea765 2011/05/03 06:53:52 satofumi
- Todo:
- Mx 計測中に他の Mx コマンドを送信したときに、適切に動作するようにする
- Enumerator:
URG_FALSE URG_TRUE BUFFER_SIZE EXPECTED_END RECEIVE_DATA_TIMEOUT RECEIVE_DATA_COMPLETE データを正常に受信
PP_RESPONSE_LINES VV_RESPONSE_LINES II_RESPONSE_LINES MAX_TIMEOUT
Definition at line 23 of file urg_sensor.c.
Function Documentation
| static int change_sensor_baudrate | ( | urg_t * | urg, |
| long | current_baudrate, | ||
| long | next_baudrate | ||
| ) | [static] |
Definition at line 177 of file urg_sensor.c.
| static int connect_urg_device | ( | urg_t * | urg, |
| long | baudrate | ||
| ) | [static] |
Definition at line 213 of file urg_sensor.c.
| static char* copy_token | ( | char * | dest, |
| char * | receive_buffer, | ||
| const char * | start_str, | ||
| const char * | end_ch, | ||
| int | lines | ||
| ) | [static] |
Definition at line 1129 of file urg_sensor.c.
| static void ignore_receive_data | ( | urg_t * | urg, |
| int | timeout | ||
| ) | [static] |
Definition at line 146 of file urg_sensor.c.
| static void ignore_receive_data_with_qt | ( | urg_t * | urg, |
| int | timeout | ||
| ) | [static] |
Definition at line 164 of file urg_sensor.c.
| static urg_measurement_type_t parse_distance_echoback | ( | urg_t * | urg, |
| const char | echoback[] | ||
| ) | [static] |
Definition at line 425 of file urg_sensor.c.
| static urg_measurement_type_t parse_distance_parameter | ( | urg_t * | urg, |
| const char | echoback[] | ||
| ) | [static] |
Definition at line 390 of file urg_sensor.c.
| static int parse_parameter | ( | const char * | parameter, |
| int | size | ||
| ) | [static] |
Definition at line 379 of file urg_sensor.c.
| static const char* receive_command_response | ( | urg_t * | urg, |
| char * | buffer, | ||
| int | buffer_size, | ||
| const char * | command, | ||
| int | response_lines | ||
| ) | [static] |
Definition at line 1158 of file urg_sensor.c.
| static int receive_data | ( | urg_t * | urg, |
| long | data[], | ||
| unsigned short | intensity[], | ||
| long * | time_stamp, | ||
| unsigned long long * | system_time_stamp | ||
| ) | [static] |
距離データの取得
Definition at line 568 of file urg_sensor.c.
| static int receive_length_data | ( | urg_t * | urg, |
| long | length[], | ||
| unsigned short | intensity[], | ||
| urg_measurement_type_t | type, | ||
| char | buffer[] | ||
| ) | [static] |
Definition at line 448 of file urg_sensor.c.
| static int receive_parameter | ( | urg_t * | urg | ) | [static] |
Definition at line 294 of file urg_sensor.c.
| static char scip_checksum | ( | const char | buffer[], |
| int | size | ||
| ) | [static] |
チェックサムの計算
Definition at line 47 of file urg_sensor.c.
| static int scip_response | ( | urg_t * | urg, |
| const char * | command, | ||
| const int | expected_ret[], | ||
| int | timeout, | ||
| char * | receive_buffer, | ||
| int | receive_buffer_max_size | ||
| ) | [static] |
Definition at line 69 of file urg_sensor.c.
| static int send_distance_command | ( | urg_t * | urg, |
| int | scan_times, | ||
| int | skip_scan, | ||
| char | single_scan_ch, | ||
| char | continuous_scan_ch, | ||
| char | scan_type_ch | ||
| ) | [static] |
Definition at line 832 of file urg_sensor.c.
| static int set_errno_and_return | ( | urg_t * | urg, |
| int | urg_errno | ||
| ) | [static] |
Definition at line 61 of file urg_sensor.c.
- See also:
- urg_open()
Definition at line 745 of file urg_sensor.c.
| int urg_get_distance | ( | urg_t * | urg, |
| long | data[], | ||
| long * | time_stamp, | ||
| unsigned long long * | system_time_stamp | ||
| ) |
- See also:
- urg_start_measurement(), urg_max_data_size()
Definition at line 934 of file urg_sensor.c.
| int urg_get_distance_intensity | ( | urg_t * | urg, |
| long | data[], | ||
| unsigned short | intensity[], | ||
| long * | time_stamp, | ||
| unsigned long long * | system_time_stamp | ||
| ) |
Example
int data_size = urg_max_data_size(&urg); long *data = malloc(data_size * sizeof(long)); long *intensity = malloc(data_size * sizeof(unsigned short)); ... urg_start_measurement(&urg, URG_DISTANCE_INTENSITY, 1, 0); int n = urg_get_distance_intensity(&urg, data, intesnity, NULLL);
- See also:
- urg_start_measurement(), urg_max_data_size()
Definition at line 943 of file urg_sensor.c.
| int urg_get_multiecho | ( | urg_t * | urg, |
| long | data_multi[], | ||
| long * | time_stamp, | ||
| unsigned long long * | system_time_stamp | ||
| ) |
Example
long *data_multi = malloc(3 * urg_max_data_size(&urg) * sizeof(long)); ... urg_start_measurement(&urg, URG_MULTIECHO, 1, 0); int n = urg_get_distance_intensity(&urg, data_multi, NULLL);
- See also:
- urg_start_measurement(), urg_max_data_size()
Definition at line 955 of file urg_sensor.c.
| int urg_get_multiecho_intensity | ( | urg_t * | urg, |
| long | data_multi[], | ||
| unsigned short | intensity_multi[], | ||
| long * | time_stamp, | ||
| unsigned long long * | system_time_stamp | ||
| ) |
Example
int data_size = urg_max_data_size(&urg); long *data_multi = malloc(3 * data_size * sizeof(long)); long *intensity_multi = malloc(3 * data_size * sizeof(unsigned short)); ... urg_start_measurement(&urg, URG_DISTANCE_INTENSITY, 1, 0); int n = urg_get_multiecho_intensity(&urg, data_multi, intesnity_multi, NULLL);
- See also:
- urg_start_measurement(), urg_max_data_size()
Definition at line 965 of file urg_sensor.c.
| int urg_is_stable | ( | urg_t * | urg | ) |
Definition at line 1122 of file urg_sensor.c.
| int urg_laser_off | ( | urg_t * | urg | ) |
Definition at line 1070 of file urg_sensor.c.
| int urg_laser_on | ( | urg_t * | urg | ) |
Definition at line 1046 of file urg_sensor.c.
| int urg_open | ( | urg_t * | urg, |
| urg_connection_type_t | connection_type, | ||
| const char * | device_or_address, | ||
| long | baudrate_or_port | ||
| ) |
- See also:
- urg_close()
Definition at line 684 of file urg_sensor.c.
| int urg_reboot | ( | urg_t * | urg | ) |
Definition at line 1076 of file urg_sensor.c.
| long urg_scip_decode | ( | const char | data[], |
| int | size | ||
| ) |
SCIP 文字列のデコード
Definition at line 364 of file urg_sensor.c.
| const char* urg_sensor_firmware_date | ( | urg_t * | urg | ) |
Definition at line 1268 of file urg_sensor.c.
| const char* urg_sensor_firmware_version | ( | urg_t * | urg | ) |
Definition at line 1244 of file urg_sensor.c.
| const char* urg_sensor_product_type | ( | urg_t * | urg | ) |
Definition at line 1180 of file urg_sensor.c.
| const char* urg_sensor_protocol_version | ( | urg_t * | urg | ) |
returns the protocol version
- Parameters:
-
[in] URG
- Returns:
- The current protocol version
Definition at line 1300 of file urg_sensor.c.
| const char* urg_sensor_serial_id | ( | urg_t * | urg | ) |
Definition at line 1201 of file urg_sensor.c.
| const char* urg_sensor_state | ( | urg_t * | urg | ) |
Definition at line 1350 of file urg_sensor.c.
| const char* urg_sensor_status | ( | urg_t * | urg | ) |
Definition at line 1325 of file urg_sensor.c.
| const char* urg_sensor_vendor | ( | urg_t * | urg | ) |
returns the vendor name
- Parameters:
-
[in] URG
- Returns:
- The vendor name
Definition at line 1221 of file urg_sensor.c.
| int urg_set_connection_data_size | ( | urg_t * | urg, |
| urg_range_data_byte_t | data_byte | ||
| ) |
Definition at line 1028 of file urg_sensor.c.
| void urg_set_error_handler | ( | urg_t * | urg, |
| urg_error_handler | handler | ||
| ) |
Definition at line 1375 of file urg_sensor.c.
| int urg_set_scanning_parameter | ( | urg_t * | urg, |
| int | first_step, | ||
| int | last_step, | ||
| int | skip_step | ||
| ) |
Example
urg_set_scanning_parameter(&urg, urg_deg2step(&urg, -45), urg_deg2step(&urg, +45), 1); urg_start_measurement(&urg, URG_DISTANCE, 0); int n = urg_get_distance(&urg, data, NULL); for (int i = 0; i < n; ++i) { printf("%d [mm], %d [deg]\n", data[i], urg_index2deg(&urg, i)); }
- See also:
- urg_step_min_max(), urg_rad2step(), urg_deg2step()
Definition at line 1009 of file urg_sensor.c.
| void urg_set_timeout_msec | ( | urg_t * | urg, |
| int | msec | ||
| ) |
タイムアウト時間の設定
- Parameters:
-
[in,out] urg URG センサ管理 [in] msec タイムアウトする時間 [msec]
- Attention:
- urg_open() を呼び出すと timeout の設定値はデフォルト値に初期化されるため、この関数は urg_open() 後に呼び出すこと。
Definition at line 755 of file urg_sensor.c.
Definition at line 1101 of file urg_sensor.c.
| int urg_start_measurement | ( | urg_t * | urg, |
| urg_measurement_type_t | type, | ||
| int | scan_times, | ||
| int | skip_scan | ||
| ) |
- See also:
- urg_get_distance(), urg_get_distance_intensity(), urg_get_multiecho(), urg_get_multiecho_intensity(), urg_stop_measurement()
Definition at line 877 of file urg_sensor.c.
| int urg_start_time_stamp_mode | ( | urg_t * | urg | ) |
Definition at line 761 of file urg_sensor.c.
| int urg_stop_measurement | ( | urg_t * | urg | ) |
Example
urg_start_measurement(&urg, URG_DISTANCE, URG_SCAN_INFINITY, 0); for (int i = 0; i < 10; ++i) { urg_get_distance(&urg, data, NULL); } urg_stop_measurement(&urg);
- See also:
- urg_start_measurement()
Definition at line 978 of file urg_sensor.c.
| int urg_stop_time_stamp_mode | ( | urg_t * | urg | ) |
Definition at line 813 of file urg_sensor.c.
| long urg_time_stamp | ( | urg_t * | urg | ) |
Definition at line 780 of file urg_sensor.c.
| void urg_wakeup | ( | urg_t * | urg | ) |
Definition at line 1116 of file urg_sensor.c.
Variable Documentation
const char NOT_CONNECTED_MESSAGE[] = "not connected." [static] |
Definition at line 42 of file urg_sensor.c.
const char RECEIVE_ERROR_MESSAGE[] = "receive error." [static] |
Definition at line 43 of file urg_sensor.c.