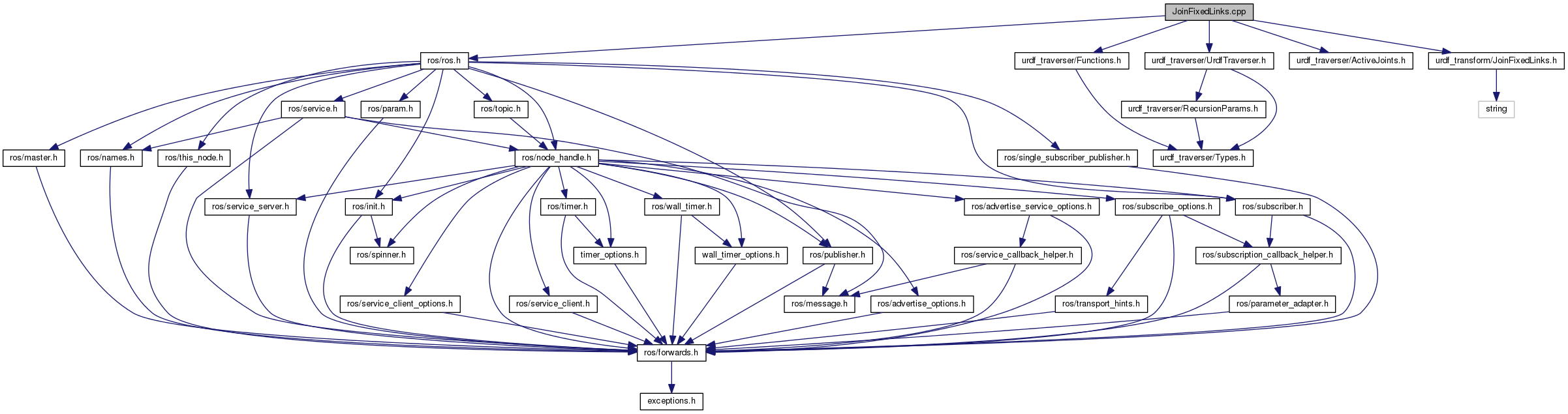
#include <ros/ros.h>#include <urdf_traverser/UrdfTraverser.h>#include <urdf_traverser/Functions.h>#include <urdf_traverser/ActiveJoints.h>#include <urdf_transform/JoinFixedLinks.h>
Include dependency graph for JoinFixedLinks.cpp:
Go to the source code of this file.
Functions | |
| int | joinFixedLinksOnThis (urdf_traverser::RecursionParamsPtr ¶ms) |
Function Documentation
| int joinFixedLinksOnThis | ( | urdf_traverser::RecursionParamsPtr & | params | ) |
Callback: If the parent joint of this link is fixed, it will be removed, and this link's visual will be connected to the parent link. If the joint was active, the function returns the same link as in the parameter. Otherwise, it returns the pointer to the parent link which now contains this link's visual/collision.
Definition at line 48 of file JoinFixedLinks.cpp.