PointXYZRGBSIFT is a PCL PointXYZ with additionnal fields like a (SIFT) descriptor of the point (computed by opencv) More...
Include dependency graph for PointXYZRGBSIFT.h:

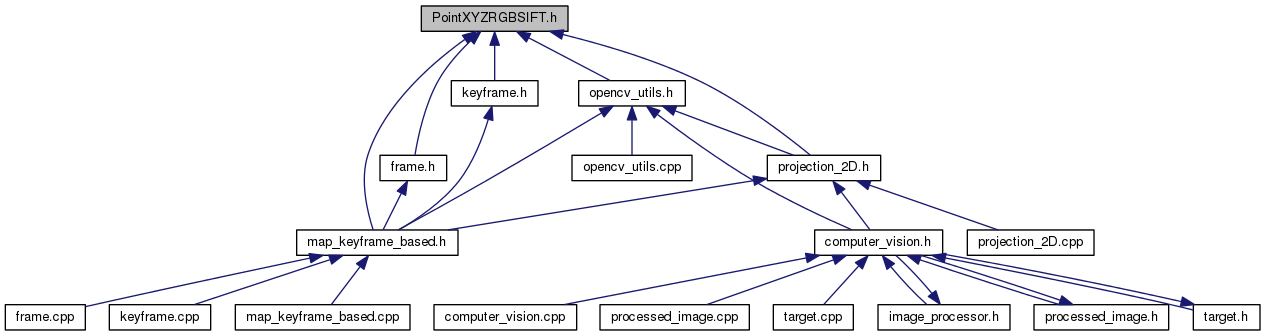
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | pcl::PointXYZRGBSIFT |
Namespaces | |
| namespace | pcl |
Defines | |
| #define | PCL_NO_PRECOMPILE |
Functions | |
| POINT_CLOUD_REGISTER_POINT_STRUCT (pcl::PointXYZRGBSIFT,(float, x, x)(float, y, y)(float, z, z)(float, rgb, rgb)(float[DESCRIPTOR_SIZE], descriptor, descriptor)(int, view_count, view_count)(int, keyframe_ID, keyframe_ID)) namespace pcl | |
Variables | |
| struct pcl::PointXYZRGBSIFT | pcl::EIGEN_ALIGN16 |
Detailed Description
PointXYZRGBSIFT is a PCL PointXYZ with additionnal fields like a (SIFT) descriptor of the point (computed by opencv)
Definition in file PointXYZRGBSIFT.h.
Define Documentation
| #define PCL_NO_PRECOMPILE |
Definition at line 10 of file PointXYZRGBSIFT.h.
Function Documentation
| POINT_CLOUD_REGISTER_POINT_STRUCT | ( | pcl::PointXYZRGBSIFT | , |
| (float, x, x)(float, y, y)(float, z, z)(float, rgb, rgb)(float[DESCRIPTOR_SIZE], descriptor,descriptor)(int, view_count, view_count)(int, keyframe_ID,keyframe_ID) | |||
| ) |
Definition at line 31 of file PointXYZRGBSIFT.h.