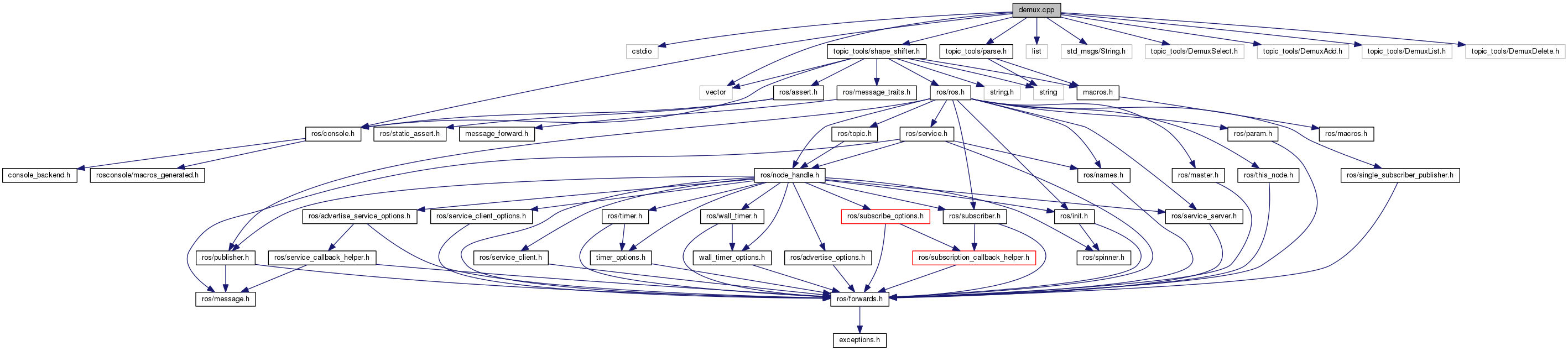
#include <cstdio>#include <vector>#include <list>#include "ros/console.h"#include "std_msgs/String.h"#include "topic_tools/DemuxSelect.h"#include "topic_tools/DemuxAdd.h"#include "topic_tools/DemuxList.h"#include "topic_tools/DemuxDelete.h"#include "topic_tools/shape_shifter.h"#include "topic_tools/parse.h"
Include dependency graph for demux.cpp:
Go to the source code of this file.
Classes | |
| struct | pub_info_t |
Functions | |
| bool | add_topic_cb (topic_tools::DemuxAdd::Request &req, topic_tools::DemuxAdd::Response &res) |
| bool | del_topic_cb (topic_tools::DemuxDelete::Request &req, topic_tools::DemuxDelete::Response &res) |
| void | in_cb (const boost::shared_ptr< ShapeShifter const > &msg) |
| bool | list_topic_cb (topic_tools::DemuxList::Request &req, topic_tools::DemuxList::Response &res) |
| int | main (int argc, char **argv) |
| bool | sel_srv_cb (topic_tools::DemuxSelect::Request &req, topic_tools::DemuxSelect::Response &res) |
Variables | |
| static string | g_input_topic |
| static ros::NodeHandle * | g_node = NULL |
| static const string | g_none_topic = "__none" |
| static ros::Publisher | g_pub_selected |
| static list< struct pub_info_t > | g_pubs |
| static list< struct pub_info_t > ::iterator | g_selected = g_pubs.end() |
| static ros::Subscriber | g_sub |
Function Documentation
| bool add_topic_cb | ( | topic_tools::DemuxAdd::Request & | req, |
| topic_tools::DemuxAdd::Response & | res | ||
| ) |
| bool del_topic_cb | ( | topic_tools::DemuxDelete::Request & | req, |
| topic_tools::DemuxDelete::Response & | res | ||
| ) |
| void in_cb | ( | const boost::shared_ptr< ShapeShifter const > & | msg | ) |
| bool list_topic_cb | ( | topic_tools::DemuxList::Request & | req, |
| topic_tools::DemuxList::Response & | res | ||
| ) |
| bool sel_srv_cb | ( | topic_tools::DemuxSelect::Request & | req, |
| topic_tools::DemuxSelect::Response & | res | ||
| ) |
Variable Documentation
string g_input_topic [static] |
ros::NodeHandle* g_node = NULL [static] |
const string g_none_topic = "__none" [static] |
ros::Publisher g_pub_selected [static] |
list<struct pub_info_t> g_pubs [static] |
list<struct pub_info_t>::iterator g_selected = g_pubs.end() [static] |
ros::Subscriber g_sub [static] |