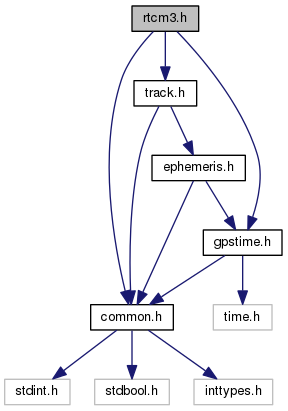
Include dependency graph for rtcm3.h:
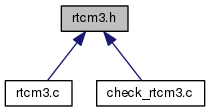
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| s16 | rtcm3_check_frame (u8 *buff) |
| s8 | rtcm3_decode_1002 (u8 *buff, u16 *id, double *tow, u8 *n_sat, navigation_measurement_t *nm, u8 *sync) |
| u16 | rtcm3_encode_1002 (u8 *buff, u16 id, gps_time_t t, u8 n_sat, navigation_measurement_t *nm, u8 sync) |
| void | rtcm3_read_header (u8 *buff, u16 *type, u16 *id, double *tow, u8 *sync, u8 *n_sat, u8 *div_free, u8 *smooth) |
| s8 | rtcm3_write_frame (u16 len, u8 *buff) |
| void | rtcm3_write_header (u8 *buff, u16 type, u16 id, gps_time_t t, u8 sync, u8 n_sat, u8 div_free, u8 smooth) |