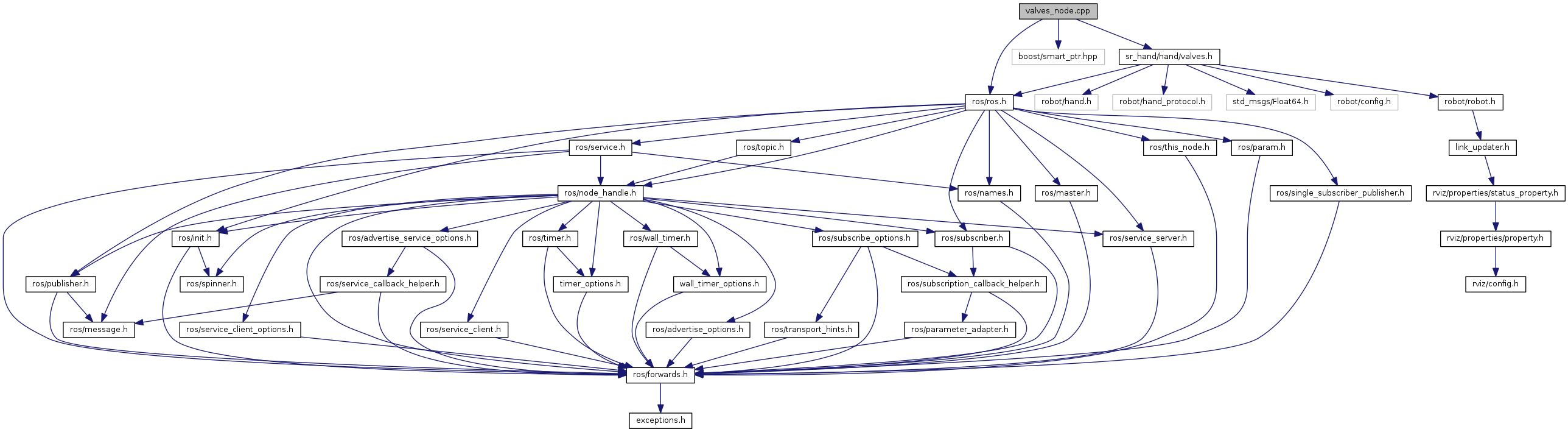
Include dependency graph for valves_node.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
The main function initialises this ROS subscriber and sets the different callbacks. This ROS subscriber will listen for new commands and send them to the real robot.
- Parameters:
-
argc argv
- Returns:
- 0 on success
Definition at line 52 of file valves_node.cpp.