Defines the SickLD class for working with the Sick LD-OEM/LD-LRS long range LIDARs. More...
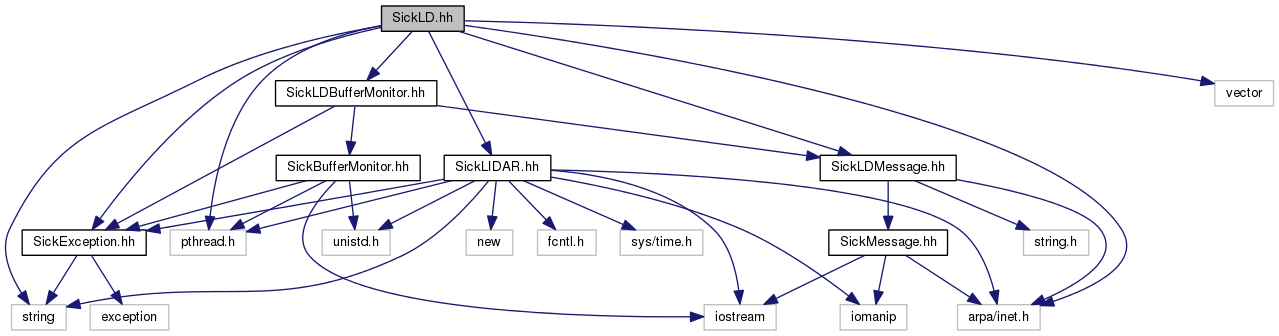
#include <string>#include <vector>#include <pthread.h>#include <arpa/inet.h>#include "SickLIDAR.hh"#include "SickLDBufferMonitor.hh"#include "SickLDMessage.hh"#include "SickException.hh"
Include dependency graph for SickLD.hh:
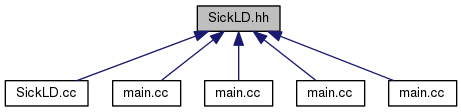
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | SickToolbox::SickLD::sick_ld_config_ethernet_tag |
| A structure to aggregate the data used to configure the Sick LD unit for Ethernet. More... | |
| struct | SickToolbox::SickLD::sick_ld_config_global_tag |
| A structure to aggregate the data used to configure the Sick LD global parameter values. More... | |
| struct | SickToolbox::SickLD::sick_ld_config_sector_tag |
| A structure to aggregate data used to define the Sick LD's sector configuration. More... | |
| struct | SickToolbox::SickLD::sick_ld_identity_tag |
| A structure to aggregate the fields that collectively define the identity of a Sick LD unit. More... | |
| struct | SickToolbox::SickLD::sick_ld_scan_profile_tag |
| A structure to aggregate the fields that collectively define the profile of a single scan acquired from the Sick LD unit. More... | |
| struct | SickToolbox::SickLD::sick_ld_sector_data_tag |
| A structure to aggregate the fields that collectively define a sector in the scan area of the Sick LD unit. More... | |
| class | SickToolbox::SickLD |
| Provides a simple driver interface for working with the Sick LD-OEM/Sick LD-LRS long-range models via Ethernet. More... | |
Namespaces | |
| namespace | SickToolbox |
Encapsulates the Sick LIDAR Matlab/C++ toolbox. | |
Defines | |
| #define | DEFAULT_SICK_CONNECT_TIMEOUT (unsigned int)(1e6) |
| The max time to wait before considering a connection attempt as failed (usecs) | |
| #define | DEFAULT_SICK_IP_ADDRESS "192.168.1.10" |
| Default Sick LD INet 4 address. | |
| #define | DEFAULT_SICK_MESSAGE_TIMEOUT (unsigned int)(5e6) |
| The max time to wait for a message reply (usecs) | |
| #define | DEFAULT_SICK_NUM_SCAN_PROFILES (0) |
| Setting this value to 0 will tell the Sick LD to stream measurements when measurement data is requested (NOTE: A profile is a single scans worth of range measurements) | |
| #define | DEFAULT_SICK_SIGNAL_SET (0) |
| Default Sick signal configuration. | |
| #define | DEFAULT_SICK_TCP_PORT (49152) |
| Default TCP port. | |
| #define | SWAP_VALUES(x, y, t) (t=x,x=y,y=t); |
| A simple macro for swapping two values. | |
Detailed Description
Defines the SickLD class for working with the Sick LD-OEM/LD-LRS long range LIDARs.
Code by Jason C. Derenick and Thomas H. Miller. Contact derenick(at)lehigh(dot)edu
The Sick LIDAR Matlab/C++ Toolbox Copyright (c) 2008, Jason C. Derenick and Thomas H. Miller All rights reserved.
This software is released under a BSD Open-Source License. See http://sicktoolbox.sourceforge.net
Definition in file SickLD.hh.
Define Documentation
| #define DEFAULT_SICK_CONNECT_TIMEOUT (unsigned int)(1e6) |
| #define DEFAULT_SICK_IP_ADDRESS "192.168.1.10" |
| #define DEFAULT_SICK_MESSAGE_TIMEOUT (unsigned int)(5e6) |
| #define DEFAULT_SICK_NUM_SCAN_PROFILES (0) |
| #define DEFAULT_SICK_SIGNAL_SET (0) |
| #define DEFAULT_SICK_TCP_PORT (49152) |
| #define SWAP_VALUES | ( | x, | |
| y, | |||
| t | |||
| ) | (t=x,x=y,y=t); |