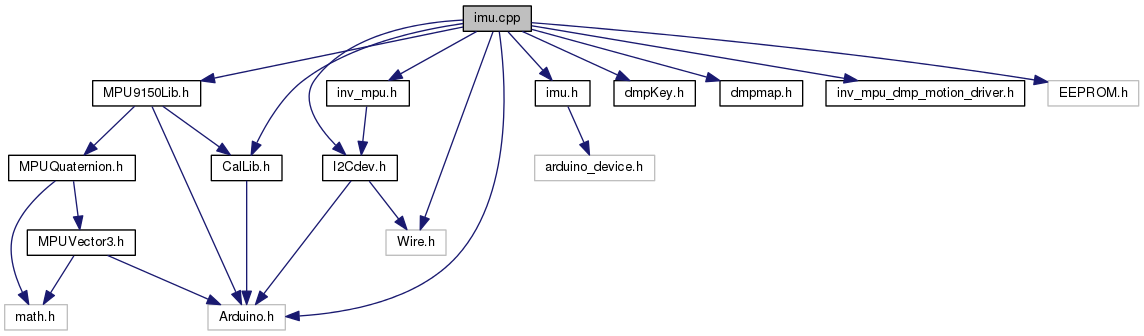
#include <Arduino.h>#include <imu.h>#include <Wire.h>#include "I2Cdev.h"#include "MPU9150Lib.h"#include "CalLib.h"#include <dmpKey.h>#include <dmpmap.h>#include <inv_mpu.h>#include <inv_mpu_dmp_motion_driver.h>#include <EEPROM.h>
Include dependency graph for imu.cpp:
Go to the source code of this file.
Defines | |
| #define | DEVICE_TO_USE 0 |
| use the device at 0x68 | |
| #define | MAG_UPDATE_RATE (10) |
| #define | MPU_LPF_RATE 40 |
| MPU_LPF_RATE is the low pas filter rate and can be between 5 and 188Hz. | |
| #define | MPU_MAG_MIX_GYRO_AND_MAG 10 |
| a good mix value | |
| #define | MPU_UPDATE_RATE (20) |
Variables | |
| MPU9150Lib | MPU |
| the MPU object | |
Detailed Description
Arduino-attached MPU-9150 inertial measurement unit for Segbot version 2.
Definition in file imu.cpp.
Define Documentation
| #define DEVICE_TO_USE 0 |
| #define MAG_UPDATE_RATE (10) |
| #define MPU_LPF_RATE 40 |
| #define MPU_MAG_MIX_GYRO_AND_MAG 10 |
| #define MPU_UPDATE_RATE (20) |