#include <static_layer.h>
Public Member Functions | |
| virtual void | activate () |
| virtual void | deactivate () |
| virtual void | matchSize () |
| virtual void | onInitialize () |
| virtual void | reset () |
| StaticLayer () | |
| virtual void | updateBounds (double robot_x, double robot_y, double robot_yaw, double *min_x, double *min_y, double *max_x, double *max_y) |
| virtual void | updateCosts (costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) |
| virtual | ~StaticLayer () |
Private Member Functions | |
| void | incomingMap (const nav_msgs::OccupancyGridConstPtr &new_map) |
| Callback to update the costmap's map from the map_server. | |
| void | incomingUpdate (const map_msgs::OccupancyGridUpdateConstPtr &update) |
| unsigned char | interpretValue (unsigned char value) |
| void | reconfigureCB (costmap_2d::GenericPluginConfig &config, uint32_t level) |
Private Attributes | |
| dynamic_reconfigure::Server < costmap_2d::GenericPluginConfig > * | dsrv_ |
| std::string | global_frame_ |
| The global frame for the costmap. | |
| bool | has_updated_data_ |
| unsigned int | height_ |
| unsigned char | lethal_threshold_ |
| boost::recursive_mutex | lock_ |
| bool | map_received_ |
| ros::Subscriber | map_sub_ |
| ros::Subscriber | map_update_sub_ |
| bool | subscribe_to_updates_ |
| bool | track_unknown_space_ |
| bool | trinary_costmap_ |
| unsigned char | unknown_cost_value_ |
| bool | use_maximum_ |
| unsigned int | width_ |
| unsigned int | x_ |
| unsigned int | y_ |
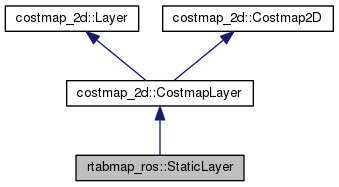
Detailed Description
Definition at line 53 of file static_layer.h.
Constructor & Destructor Documentation
Definition at line 56 of file static_layer.cpp.
| rtabmap_ros::StaticLayer::~StaticLayer | ( | ) | [virtual] |
Definition at line 58 of file static_layer.cpp.
Member Function Documentation
| void rtabmap_ros::StaticLayer::activate | ( | ) | [virtual] |
Reimplemented from costmap_2d::Layer.
Definition at line 217 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::deactivate | ( | ) | [virtual] |
Reimplemented from costmap_2d::Layer.
Definition at line 222 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::incomingMap | ( | const nav_msgs::OccupancyGridConstPtr & | new_map | ) | [private] |
Callback to update the costmap's map from the map_server.
- Parameters:
-
new_map The map to put into the costmap. The origin of the new map along with its size will determine what parts of the costmap's static map are overwritten.
Definition at line 150 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::incomingUpdate | ( | const map_msgs::OccupancyGridUpdateConstPtr & | update | ) | [private] |
Definition at line 196 of file static_layer.cpp.
| unsigned char rtabmap_ros::StaticLayer::interpretValue | ( | unsigned char | value | ) | [private] |
Definition at line 136 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::matchSize | ( | ) | [virtual] |
Reimplemented from costmap_2d::CostmapLayer.
Definition at line 129 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::onInitialize | ( | ) | [virtual] |
Reimplemented from costmap_2d::Layer.
Definition at line 64 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::reconfigureCB | ( | costmap_2d::GenericPluginConfig & | config, |
| uint32_t | level | ||
| ) | [private] |
Definition at line 117 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::reset | ( | ) | [virtual] |
Reimplemented from costmap_2d::Layer.
Definition at line 229 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::updateBounds | ( | double | robot_x, |
| double | robot_y, | ||
| double | robot_yaw, | ||
| double * | min_x, | ||
| double * | min_y, | ||
| double * | max_x, | ||
| double * | max_y | ||
| ) | [virtual] |
Reimplemented from costmap_2d::Layer.
Definition at line 235 of file static_layer.cpp.
| void rtabmap_ros::StaticLayer::updateCosts | ( | costmap_2d::Costmap2D & | master_grid, |
| int | min_i, | ||
| int | min_j, | ||
| int | max_i, | ||
| int | max_j | ||
| ) | [virtual] |
Reimplemented from costmap_2d::Layer.
Definition at line 256 of file static_layer.cpp.
Member Data Documentation
dynamic_reconfigure::Server<costmap_2d::GenericPluginConfig>* rtabmap_ros::StaticLayer::dsrv_ [private] |
Definition at line 95 of file static_layer.h.
std::string rtabmap_ros::StaticLayer::global_frame_ [private] |
The global frame for the costmap.
Definition at line 82 of file static_layer.h.
bool rtabmap_ros::StaticLayer::has_updated_data_ [private] |
Definition at line 85 of file static_layer.h.
unsigned int rtabmap_ros::StaticLayer::height_ [private] |
Definition at line 86 of file static_layer.h.
unsigned char rtabmap_ros::StaticLayer::lethal_threshold_ [private] |
Definition at line 92 of file static_layer.h.
boost::recursive_mutex rtabmap_ros::StaticLayer::lock_ [mutable, private] |
Definition at line 94 of file static_layer.h.
bool rtabmap_ros::StaticLayer::map_received_ [private] |
Definition at line 84 of file static_layer.h.
Definition at line 90 of file static_layer.h.
Definition at line 90 of file static_layer.h.
bool rtabmap_ros::StaticLayer::subscribe_to_updates_ [private] |
Definition at line 83 of file static_layer.h.
bool rtabmap_ros::StaticLayer::track_unknown_space_ [private] |
Definition at line 87 of file static_layer.h.
bool rtabmap_ros::StaticLayer::trinary_costmap_ [private] |
Definition at line 89 of file static_layer.h.
unsigned char rtabmap_ros::StaticLayer::unknown_cost_value_ [private] |
Definition at line 92 of file static_layer.h.
bool rtabmap_ros::StaticLayer::use_maximum_ [private] |
Definition at line 88 of file static_layer.h.
unsigned int rtabmap_ros::StaticLayer::width_ [private] |
Definition at line 86 of file static_layer.h.
unsigned int rtabmap_ros::StaticLayer::x_ [private] |
Definition at line 86 of file static_layer.h.
unsigned int rtabmap_ros::StaticLayer::y_ [private] |
Definition at line 86 of file static_layer.h.
The documentation for this class was generated from the following files: