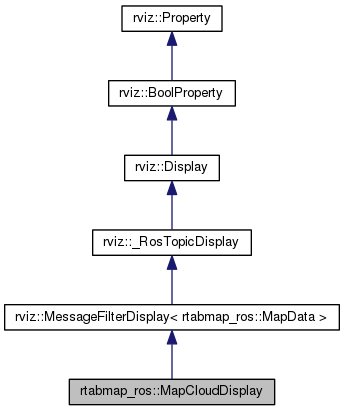
Displays point clouds from rtabmap::MapData. More...
#include <MapCloudDisplay.h>
Detailed Description
Displays point clouds from rtabmap::MapData.
By default it will assume channel 0 of the cloud is an intensity value, and will color them by intensity. If you set the channel's name to "rgb", it will interpret the channel as an integer rgb value, with r, g and b all being 8 bits.
Definition at line 74 of file MapCloudDisplay.h.
Member Typedef Documentation
| typedef boost::shared_ptr<CloudInfo> rtabmap_ros::MapCloudDisplay::CloudInfoPtr |
Definition at line 97 of file MapCloudDisplay.h.
typedef std::map<std::string, TransformerInfo> rtabmap_ros::MapCloudDisplay::M_TransformerInfo [private] |
Definition at line 183 of file MapCloudDisplay.h.
Constructor & Destructor Documentation
Definition at line 87 of file MapCloudDisplay.cpp.
| rtabmap_ros::MapCloudDisplay::~MapCloudDisplay | ( | ) | [virtual] |
Definition at line 197 of file MapCloudDisplay.cpp.
Member Function Documentation
| void rtabmap_ros::MapCloudDisplay::causeRetransform | ( | ) | [slot] |
Definition at line 592 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::downloadGraph | ( | ) | [private, slot] |
Definition at line 537 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::downloadMap | ( | ) | [private, slot] |
Definition at line 479 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::fillTransformerOptions | ( | rviz::EnumProperty * | prop, |
| uint32_t | mask | ||
| ) | [private] |
Definition at line 774 of file MapCloudDisplay.cpp.
| rviz::PointCloudTransformerPtr rtabmap_ros::MapCloudDisplay::getColorTransformer | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [private] |
Definition at line 815 of file MapCloudDisplay.cpp.
| rviz::PointCloudTransformerPtr rtabmap_ros::MapCloudDisplay::getXYZTransformer | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [private] |
Definition at line 799 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::loadTransformers | ( | ) | [private] |
Definition at line 207 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::onInitialize | ( | ) | [protected, virtual] |
Do initialization. Overridden from MessageFilterDisplay.
Reimplemented from rviz::MessageFilterDisplay< rtabmap_ros::MapData >.
Definition at line 242 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::processMapData | ( | const rtabmap_ros::MapData & | map | ) | [private] |
Definition at line 263 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::processMessage | ( | const rtabmap_ros::MapDataConstPtr & | cloud | ) | [protected, virtual] |
Process a single message. Overridden from MessageFilterDisplay.
Definition at line 256 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::reset | ( | ) | [virtual] |
Reimplemented from rviz::MessageFilterDisplay< rtabmap_ros::MapData >.
Definition at line 728 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::retransform | ( | ) | [private] |
Definition at line 832 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::setColorTransformerOptions | ( | EnumProperty * | prop | ) | [private, slot] |
Definition at line 769 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::setPropertiesHidden | ( | const QList< Property * > & | props, |
| bool | hide | ||
| ) | [private] |
Definition at line 349 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::setXyzTransformerOptions | ( | EnumProperty * | prop | ) | [private, slot] |
Definition at line 764 of file MapCloudDisplay.cpp.
| bool rtabmap_ros::MapCloudDisplay::transformCloud | ( | const CloudInfoPtr & | cloud, |
| bool | fully_update_transformers | ||
| ) | [private] |
Transforms the cloud into the correct frame, and sets up our renderable cloud.
Definition at line 845 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::update | ( | float | wall_dt, |
| float | ros_dt | ||
| ) | [virtual] |
Reimplemented from rviz::Display.
Definition at line 597 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateAlpha | ( | ) | [private, slot] |
Definition at line 427 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateBillboardSize | ( | ) | [private, slot] |
Definition at line 455 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateCloudParameters | ( | ) | [private, slot] |
Definition at line 474 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateColorTransformer | ( | ) | [private, slot] |
Definition at line 753 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateStyle | ( | ) | [private, slot] |
Definition at line 435 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateTransformers | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [private] |
Definition at line 357 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateXyzTransformer | ( | ) | [private, slot] |
Definition at line 742 of file MapCloudDisplay.cpp.
Member Data Documentation
Definition at line 107 of file MapCloudDisplay.h.
Definition at line 164 of file MapCloudDisplay.h.
Definition at line 111 of file MapCloudDisplay.h.
Definition at line 116 of file MapCloudDisplay.h.
Definition at line 115 of file MapCloudDisplay.h.
std::map<int, CloudInfoPtr> rtabmap_ros::MapCloudDisplay::cloud_infos_ [private] |
Definition at line 166 of file MapCloudDisplay.h.
Definition at line 112 of file MapCloudDisplay.h.
Definition at line 113 of file MapCloudDisplay.h.
Definition at line 114 of file MapCloudDisplay.h.
Definition at line 109 of file MapCloudDisplay.h.
std::map<int, rtabmap::Transform> rtabmap_ros::MapCloudDisplay::current_map_ [private] |
Definition at line 171 of file MapCloudDisplay.h.
boost::mutex rtabmap_ros::MapCloudDisplay::current_map_mutex_ [private] |
Definition at line 172 of file MapCloudDisplay.h.
Definition at line 120 of file MapCloudDisplay.h.
Definition at line 119 of file MapCloudDisplay.h.
bool rtabmap_ros::MapCloudDisplay::needs_retransform_ [private] |
Definition at line 189 of file MapCloudDisplay.h.
std::map<int, CloudInfoPtr> rtabmap_ros::MapCloudDisplay::new_cloud_infos_ [private] |
Definition at line 168 of file MapCloudDisplay.h.
boost::mutex rtabmap_ros::MapCloudDisplay::new_clouds_mutex_ [private] |
Definition at line 169 of file MapCloudDisplay.h.
bool rtabmap_ros::MapCloudDisplay::new_color_transformer_ [private] |
Definition at line 188 of file MapCloudDisplay.h.
bool rtabmap_ros::MapCloudDisplay::new_xyz_transformer_ [private] |
Definition at line 187 of file MapCloudDisplay.h.
Definition at line 118 of file MapCloudDisplay.h.
Definition at line 117 of file MapCloudDisplay.h.
Definition at line 106 of file MapCloudDisplay.h.
Definition at line 105 of file MapCloudDisplay.h.
Definition at line 163 of file MapCloudDisplay.h.
Definition at line 110 of file MapCloudDisplay.h.
pluginlib::ClassLoader<rviz::PointCloudTransformer>* rtabmap_ros::MapCloudDisplay::transformer_class_loader_ [private] |
Definition at line 191 of file MapCloudDisplay.h.
Definition at line 186 of file MapCloudDisplay.h.
boost::recursive_mutex rtabmap_ros::MapCloudDisplay::transformers_mutex_ [private] |
Definition at line 185 of file MapCloudDisplay.h.
Definition at line 108 of file MapCloudDisplay.h.
The documentation for this class was generated from the following files: